研究NOW!
Campus Mail Research

国内外から注目を集める福工大の研究。 その一部をそれぞれ1枚のレポートで紹介します。
-

vol.27
仮想現実空間・ユーザーインターフェースを開発
-

vol.26
脳の機能解明からAIが進化へ
よりダイナミックに。世界に通ずるAIを -

vol.25
農水産物に新機能を発見
付加価値で新たな特産・化粧品を -
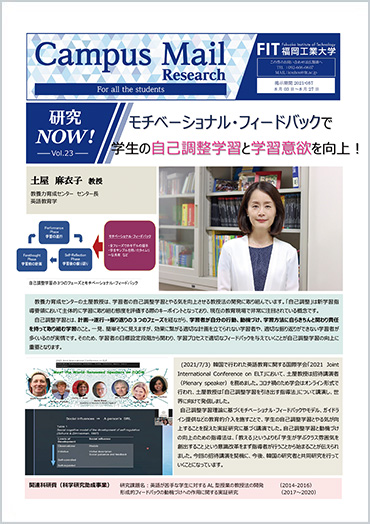
vol.23
モチベーショナル・フィードバックで
自己調整学習と学習意欲を向上! -
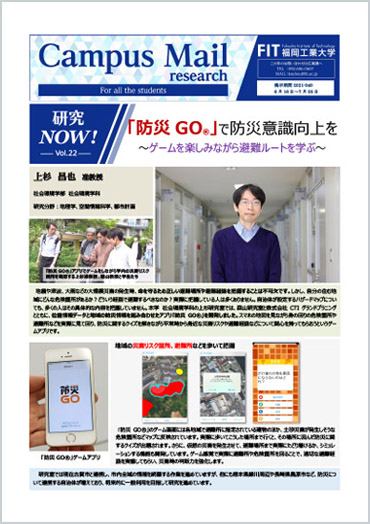
vol.22
「防災GO®」で防災意識向上を
楽しみながら避難ルートを学ぶ -

vol.20
「プラズマ」の分析、応用
新たなエネルギーで農業活性化へ -

vol.19
液体?気体?
「超臨界流体」で新ナノ素材開発 -
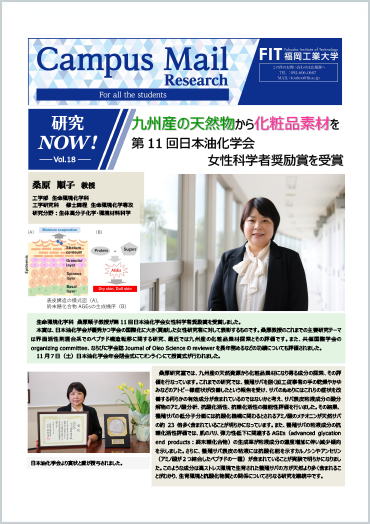
vol.18
九州産の天然物から化粧品素材を
-

vol.17
ウェアラブルデバイスで
新しい健康管理 -

vol.16
VRやDLで、子供や
お年寄りを交通事故から守る -
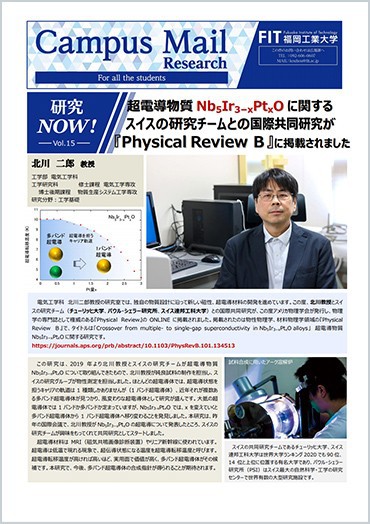
vol.15
新たな超電導材料を開発
-

vol.14
AI技術で津波を予知
-
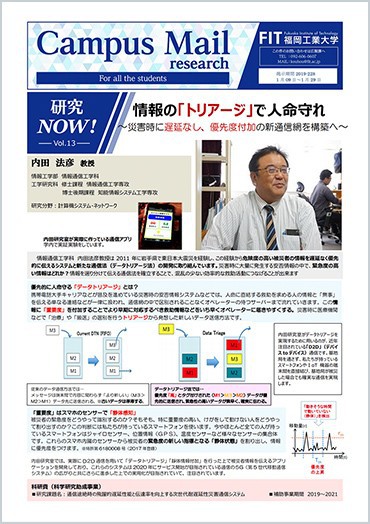
vol.13
情報の『トリアージ』で人命を守る
-

vol.12
ナノスケールデバイスに向けた原子操作の実現と
電子トンネル機構を解明 -

vol.11
マイクロプラスチックが大気中にも拡散
-
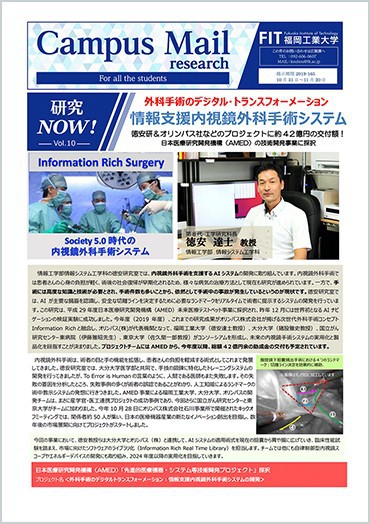
vol.10
世界初、AIが内視鏡外科手術を支援
-
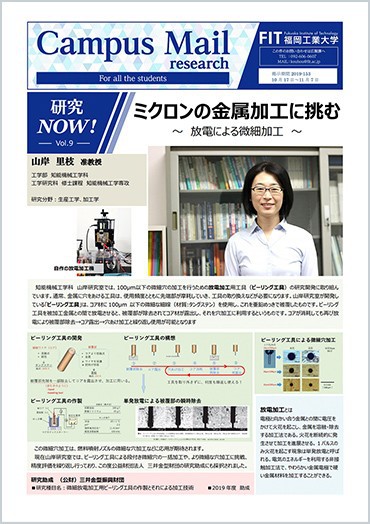
vol.9
ミクロンの金属加工に挑む
-
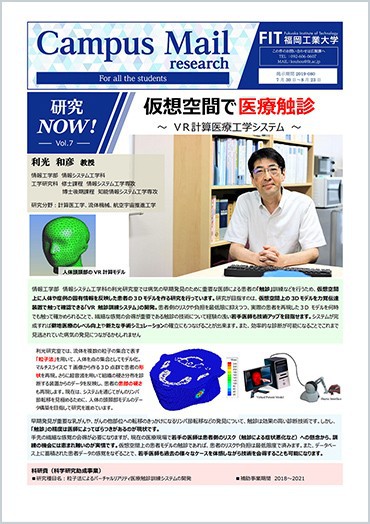
vol.7
VRで触診訓練
-

vol.6
災害情報の電子化で被害の拡大を防ぐ
-
vol.5
新技術『環境DNA』で生態系保全をめざす
-

vol.4
IOTで洪水を予測
-

vol.3
交通事故を未然に防ぐ、
自動車運転時の新指標 -

vol.2
『焼酎かす』が次世代電源に
-

vol.1
規格外農作物を健康増進に役立てる