1.はじめに
地球と海の割合は3:7と海の割合が大部分を占める。また、海中は陸上のどのような山よりも深い海溝が存在し、実に神秘的な存在といえる。特にその中で生息する魚は長い年月を得て進化し、非常に優れた水中推進能力を手に入れることに成功したといえるであろう。
スクリュープロペラは、急加減速や急旋回をするのが困難であり、それに対して、魚の水中推進能力は速度、効率、浅海性能など非常に優れており、魚は複雑な運動パターンにより様々な環境の変化に応じて適応する自律的な運動システムを有していると考えられる。
本研究では、魚の運動機構と運動パターンを摸倣することにより優れた水中推進機関の開発を目的とする。今回は魚ロボットを作成する上での基礎実験を行った。
2.実験装置
今回作成した魚ロボットをFig.1とFig.2に示す。魚ロボットの動力はサーボモータ(フタバ製s9402)を使用した。
計測に関しては、Fig.3に示すように板バネを魚ロボットの先頭部に取り付け板バネのひずみを測定することにより、推進力として測定を行った。ひずみゲージの接着方法にはFig.4に示すような2ゲージ2アクティブ法を採用した。この接着方法は引っ張り成分を除去し、曲げ成分を測定することができるので今回の実験に最適であると考えられる。このようにして、Fig.5に示す実験装置を組み上げた。
実験方法は魚ロボットの各ヒレの周波数及び、位相差を固定し、パソコン(以下PC)からD/A変換器を通じて、送信機に電圧を付加し、魚ロボットを動作させることにより、歪んだ板バネに取り付けたひずみゲージの電圧をA/D変換器によりPCに取り込み、演算により推進力に変換する。そのデータを分析することにより、ロボットの特性を割り出すこととする。
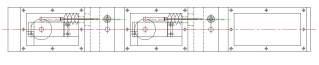 (1) Top view
(1) Top view
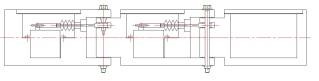 (2) Side view
(2) Side view
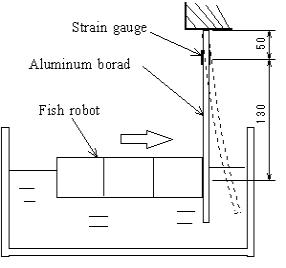
Fig. 3 Experiment equipment.
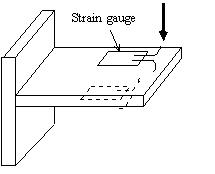
Fig. 5 Control system for the fish robot.
初期の段階では、魚ロボットのヒレ部分に内蔵されているサーボモータを動かす変位角度・サーボモータの動作周波数・2つのサーボモータ間の位相差を変化させ推進力を測定する予定であったが、魚ロボットの全長が400mm幅60mm高さ75mmで、水槽のサイズが幅300mm・高さ350mm・奥行き1500mmであるため壁にぶつかる可能性があり、角度を大きく変化させるのが困難であった。ゆえに今回は周波数と位相差のみを変化させて推進力の測定を行った。
3−1 周波数と推進力の関係
まず、角度と位相差を固定して周波数のみを変化させて推進力を測定する実験を行った。Fig.6に実験で割り出した周波数と推進力の関係を示す。
本実験では角度を±35deg、位相差を−90degに設定し、周波数を0Hzから0.2Hzずつ2.0Hzまで変化させ、推進力の測定を行った。Fig6に測定値を平均化したデータを示す。これを見ると0.8Hz及び1.2Hzのときに推進力が最高点に達している。これは周波数が低いときはなめらかな運動を行っていたが、1.0Hzを境に魚ロボットの動く角度がDA変換機から指令された変位より小さな動きしかできなくなり、2.0Hz以上になるとさらにその現象が顕著に表れるためと、水槽が狭い為、周波数が高くなると波の影響を大きく受けることが原因と推測される。
なお周波数が1.0Hzのとき推進力が減少しているが、現在この原因は不明である。
3−2 位相差と推進力の関係
4.まとめ
実験結果をまとめると周波数を1.0Hz、位相差を0度にすることにより、最も強い推力が得られることが分かった。
しかし、今回は実験に様々な制限を与えた為、魚ロボットの特性を割り出したとは言い難く、不明な点も多く見られた。
よって、今後の改善点として、
(1) より大きい水槽を用意し、魚ロボットの稼動範囲を広げる。
(2) 魚ロボットのリンク部を増設し、より複雑な動きができるようにする。
(2) 魚ロボットの制御を手動で行うのではなく、自動で行えるようにする。
参考文献
(1) 平田宏一:日本設計工学会平成11年度春季研究発表会講演論文集、No.99−春季, (199月),p.29-32