| 鳥の羽ばたき運動における最大推進力発生のための最適学習制御 |
| Optimal learning control for the maximum thrust generation in flapping of birds |
| CM01004 楠橋 伸樹 (指導教員 河村 良行 教授) |
| Abstract |
| In this study, I have studied flapping motion of a bird. We have designed and manufactured flapping robot for the experiment. I have measured generation of aerodynamic force by flapping motion using the flapping robot. I have analyzed the aerodynamic force that is generated by flapping motion to develop the bird robot. I used "mountain climbing method", which is the simplest one among neural network learning. It was successful for the optimization of flap motion. I confirmed the effect of mountain climbing method. I paid attention to the structure and material of flap aerofoil and confirmed the effect of elastic wing structure. |
| Key Words: flapping, wing, robot, neural network |
| 1. 緒言 |
| 飛行という運動手段は、歩行や車輪走行といった他の運動手段に比べ、摩擦や抵抗などの外的影響を受けにくく、高速、高効率の運動手段となっている。その中で、羽ばたき飛行という運動手段は、生物が何万年もの歳月をかけ、効率化を実現した運動で、これに着目し解析を行なうことにより、可変翼機構、ロボットやマイクロマシンの移動手段としての利用など、飛行という運動手段に更なる広がりを持たすことが可能と考えている。 そこで本研究では、羽ばたき運動をロボットで再現、鳥の羽ばたきの有効性、実用性を検証する。また、学習システムを構築することにより、羽ばたきという運動をロボットに学習・進化させ、鳥の羽ばたきを超える羽ばたき運動の獲得を試みる。 |
| 2. 実験 |
| 2.1実験方法 |
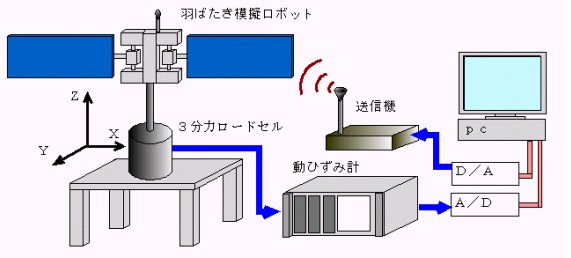
| 鳥の羽ばたき運動の構成要素は構造を簡単化して考えると、胴体に固定された前後軸から垂直に翼を上下に動かすフラッピング、前後に動かすリード・ラグ、翼のピッチを変えるフェザリングの三つの要素に分けて考えることが出来る(2)。この三つの要素をコントロールできる模擬羽ばたきロボットを開発・製作、各要素をさまざまなパターンで動かしたときの空気力を計測、発生空気力を実験的に解析する。実験装置全体のシステムを図.1に示す。 実験システムは主に、模擬ロボット、パソコン(PC)、DA変換、AD変換、ロードセル、動ひずみ計、ロボット制御用の送信機、受信機、電源で成り立つ。実験はパソコンによりロボットの運動パターンが生成され、DA変換、無線システムにより、生成された運動パターンにてロボットがコントロールされる、その運動によって発生した空気力をロードセル、動ひずみ計により計測、AD変換によりパソコンに入力、データを保存する。学習時にはこのデータを下に運動パターンが生成される。ロードセルは3分力のもので、Z、Y、X方向をそれぞれ計測する。 羽ばたき模擬ロボットは1ヒンジ、片翼2自由度の計4自由度、自由度一つ一つをサーボモータにてコントロールする構造で、全長375mm、全幅1490mm、翼面積は600mm×200mmとなる。本研究ではホバリング状態の羽ばたき運動により発生した空気力の解析を行なうので室内での無風状態の測定を行なった。 |
|
| 図.1 模擬羽ばたき実験計測システム |
| 2.2羽ばたきの基本運動 |
| 羽ばたき運動において三つの要素を組み合わせた運動は無数に考えられるが、周期運動の代表的な動きとして正弦波運動を羽ばたきに適用し、各パラメータの最適値を計測、基本運動として羽ばたき運動において最大推進力を得られるためのパラメータの傾向をつかむ事とする。 フラッピングとフェザリング、二つの要素を図.2、図.3のように時間に対し翼の角度を正弦波状に変位させ、二つの要素の動きに位相差をつけた運動の組み合わせを羽ばたきの基本運動パターンとして考えた。これによる要素ごとの運動パターンの生成は以下の式で、 |
| となる。ここで、θfl0:フラッピング振幅〔deg〕、θfe0:フェザリング振幅〔deg〕、ω:角速度 、φ:位相差とする。 この基本運動パターンでは羽ばたき運動の周期、振幅、位相の各パラメータを持ち、これを基に羽ばたき運動をおこない、発生した空気力の計測をおこなう。 |
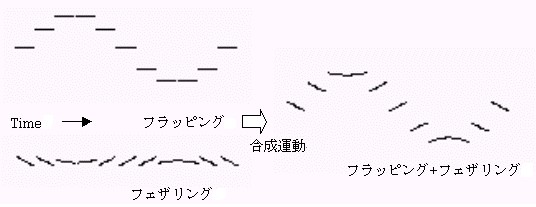 |
| 図.2 羽ばたき運動基本運動パターン(フラッピングに対するフェザリングの位相差:270deg) |
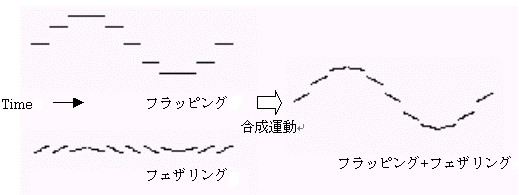 |
| 図.3 羽ばたき運動基本運動パターン(フラッピングに対するフェザリングの位相差:90deg) |
| 2.3羽ばたき運動の学習 |
| 羽ばたき運動の最適化を試みるには、無限に近い運動パターンを試みる必要があり、基本運動パターンのパラメータ変化という狭量な範囲では真の最適化はできないと考えられる。また、パラメータを広げそのすべての運動パターンを試すには膨大な時間が必要で、しかもパラメータ設定において人の発想に限りがある為、有効な運動パターンを生み出せられない可能性がある。さらに、羽ばたき運動では翼のしなり、風の乱れなど不確定な要素が多く、また羽ばたき時の推進力発生原理が不明確で、有効な解析やそれによる制御が大変困難となる。よって、不確定要素を含んだ状態での最適な運動の獲得を試みなければならず、要素ごとに周波数、振幅、位相、波形など、多数のパラメータの組み合わせを試行する組み合わせ最適問題を解かなければならない。最適解をえるための問題を解決するためには、入力と出力を設定しておけば、運動の原理特性、不確定要素を考慮しないでよいニューラルネットワーク学習が適当と考え、今回は試行錯誤学習である「山登り法」という学習にてニューラルネットワークにて最適値探索を行なうこととする。 今回、構築したネットワークモデルを図.4に示す(3)。各種波形を入力し、波形に重みを付け、それらの総和を出力とする。これをひとつの要素の動きとし、各要素それぞれにネットワークより生み出された動きを出力する。出力は次式で, |
| とする。 これを1要素ごとに出力、それに応じた羽ばたき運動を羽ばたき模擬ロボットが行なう。この羽ばたき運動によって発生した揚力Z、推力Y、横力Xの空気力を計測する。羽ばたき運動一周期で発生した揚力を平均し、一周期の運動にかかった電力で割る以下の式、 |
| を評価関数とした。 この評価関数をフィードバックさせ,図.5のフローチャートが示すように重みを変えていく。この一連の動作を繰り返し、最適な羽ばたき運動を生み出す。また、羽ばたきの基本運動パターンとの比較も試み、学習の効果を検証する。 |
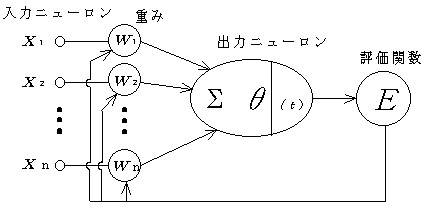 |
| 図.4 最大推力発生学習のためのニューラルネットワーク |
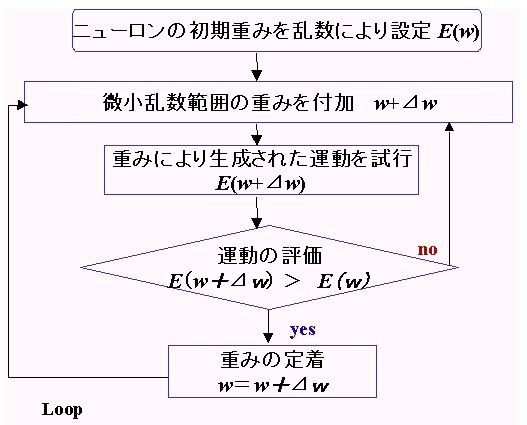 |
| 図.5 山登り法のフローチャート |
| 3. 結果と考察 |
| 3.1羽ばたきにより発生した空気力 |
| 基本運動時のフラッピングとフェザリング、二つの要素の振幅を40deg、周波数を1.5Hzと設定し、二要素の位相差を変化させたときの羽ばたき運動一周期の平均空気力を図.6にまとめた。この結果は、フラッピングとフェザリングの位相差により、羽ばたき運動による空気力発生の効果にはっきりとした違いを見せるもので、二要素の位相差つまり翼のひねりが羽ばたき運動の効果や効率に関わる重要なものであることを示す。最も効果的な運動は位相240度のあたりとなる。これは風を送る団扇を仰ぐような動作で、実際の鳥もこの羽ばたき運動パターンに近い運動を行なっていると考えられる。次に、図.7の羽ばたき運動におけるフェザリング振幅の影響だが、これも傾向が見られ適切な値を持つ。このように、羽ばたき運動は翼を前後又は上下に振るだけではなく、これにひねりを加えることにより推力又は揚力を有効に生み出していることがわかる。 図.8には府ラッピング振幅と空気力の関係を示している。式(1)から振幅をあげると角速度が上昇することが分かる、角速度を上げると空気力は増加するが、30度]付近で収束又は 低下を示す。これは今回用いたサーボモータの限界速度においての空気力発生の限界点と考えられ、サーボモータの限界がなければ理想的な上昇曲線が見られると考えている、これにより今後の羽ばたき機構開発の一つの目安が与えられたと考える。 |
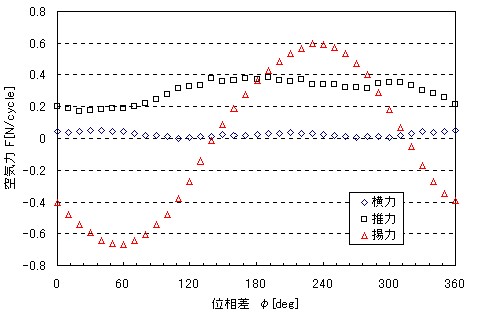 |
| 図.6 羽ばたき運動パターンにて位相差を変更したときの各軸空気力 (フラッピング : 振幅 40deg , 周期 1.5Hz ; フェザリング : 振幅 40deg , 周期 1.5Hz ,) |
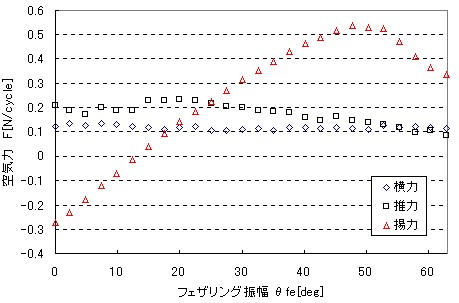 |
| 図.7羽ばたき運動パターンにてフェザリング振幅を変更したときの各軸空気力(フラッピング : 振幅 40deg , 周期 1.5Hz ; フェザリング: 周期 1.5Hz ,位相差240deg) |
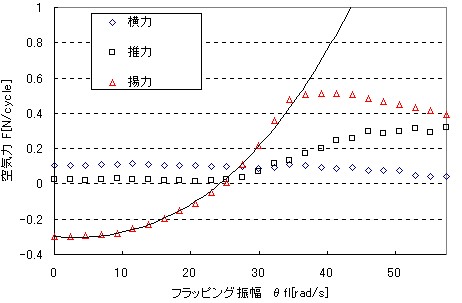 |
| 図.8羽ばたき運動パターンにてフラッピング振幅を変更したときの各軸空気力(フラッピング: 周期 1.5Hz; フェザリング : 振幅 50deg ,位相差 240deg) |
| 3.2羽ばたき運動の学習成果 |
| 図.9に横軸を試行回数、縦軸を評価関数とした山登り法での学習の成果を示す。この山登り法学習では運動が徐々に成長、評価が上昇し、学習の成果があがっていることが確認できる。このときの重みの変化を図.10に示す。この重みの成長変化、最適化に伴い評価が上がることがわかる。
ニューラルネットワークでの学習は重みの変化により運動が変化、評価が決まる。そこで、前述で説明した山登り法において重みの微小乱数変動範囲をそれぞれ変更、学習させたのが、図.11と図.12である。3つの乱数範囲における学習を比較すると、範囲が狭すぎると収束点での評価が比較的低い値となる。これはローカルミニマムに陥りそこから抜け出せない状態だと考えられる。また範囲が広くローカルミニマムから抜け出せる可能性を持たせても、無軌道の成長により、評価が低い結果となっている。この結果から学習における微小乱数変動範囲にも最適値があり、それをみたすことができなければ山登り法での学習は成功しないと考える。この微小乱数変動範囲は、学習収束のスピードにも関わり乱数範囲が広いものは、比較的早く収束していく。学習により生成された運動パターンを図.13に示す。学習により得られた運動も、ひねりをうまく使い風を送る動きとなっている。 当初用いていた、翼はバルサの骨組みにナイロン膜を貼り付けたもので、剛体的な翼構造となっている。これは、軽量、耐久性はよいものではあるが、鳥などの翼のように翼がしならない、羽ばたき運動ではこの翼のしなりが重要な因子となると考えられるので、しなり翼を製作、それを用い学習による最適化を試みる。図.14に剛体性翼としなり翼を用い学習条件を同一とし学習を行なったものを示す。この結果、しなり翼は剛体性翼に比べ1.5倍程度の推進力上昇が示された。これはしなりが下方に空気を送る量を増やし推進力を増していると考えられ、翼構造のしなりの重要性を示した。また、これは翼のしなりという不確定要素を含ませた系においても学習制御が有効だということを示した。 図.15には評価関数を変更し、揚力評価から推力評価に移行した結果を示す。推力についても学習による上昇をみせた。これは評価関数を変更することにより多様な学習の可能性を示す。 |
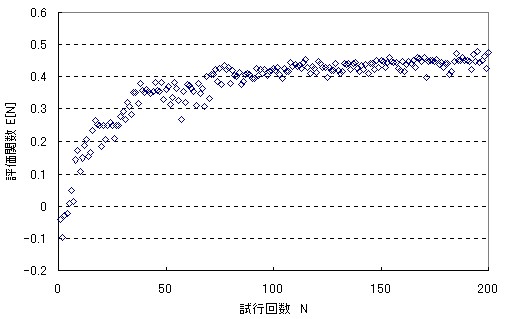 |
| 図.9 山登り法学習の成果 (一回の学習での乱数範囲 ±0.2) |
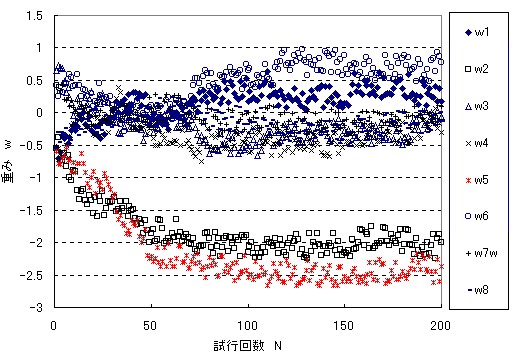 |
| 図.10 学習時の重みの変化 |
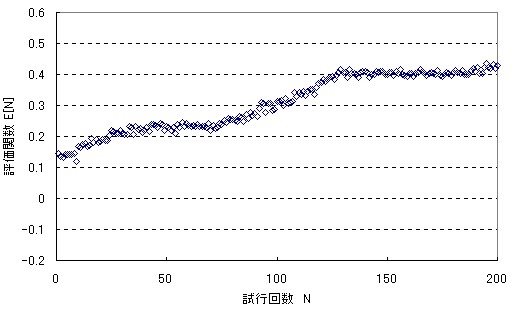 |
| 図.11 山登り法学習の成果 (一回の学習での乱数範囲 ±0.1) |
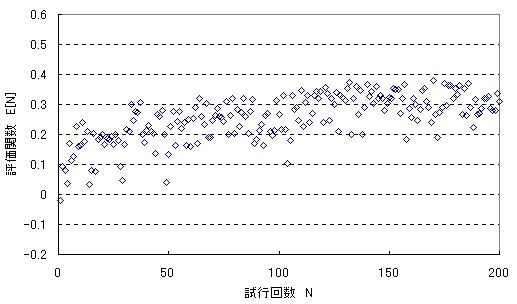 |
| 図.12 山登り法学習の成果 (一回の学習での乱数範囲 ±0.8) |
 |
| 図.13 山登り法学習で最終的に得られた運動パターンのコマ送り写真 |
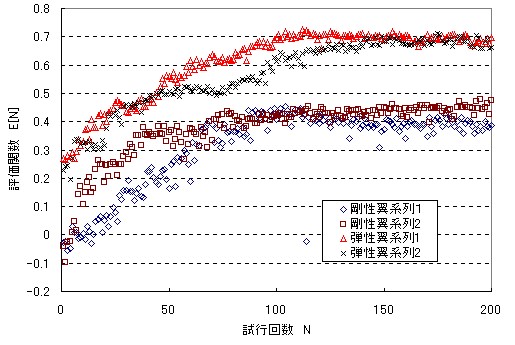 |
| 図.14 山登り法学習にて翼材質を変更した時の成長比較 (一回の学習での乱数範囲 ±0.2 ) |
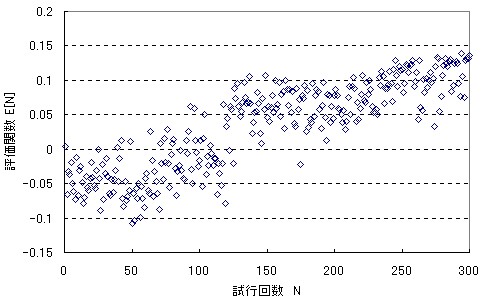 |
| 図.14 山登り法学習にて推力方向の空気力を成長 (一回の学習での乱数範囲±1.0 ) |
| 4. 結言 | ||||
| 実験的に羽ばたきによって発生する空気力を計測する方法を構築し、基本運動時に発生された空気力の傾向を捉えることができた。学習により有効な運動パターンが形成されることを確認した。 理論値、実測値の比較においても羽ばたき運動はその有効性を示し、効率的な運動であるといえる。また、この結果は羽ばたき運動による揚力発生原理が特殊な状態を示し、今後これらの結果から羽ばたき運動の揚力発生原理の解明が求められる。 翼構造においても特殊なしなり翼を用いることにより効果が倍増することを確認、運動パターンの最適化だけではなく、翼構造の最適化により推進力増加が望めると考えられる。この翼構造の最適化は翼材質、翼形状、また翼関節の数など多岐にわたる。また、現在のサーボモータ機構では、正逆転を繰り返す機構となっているため応答速度が遅く、それによって発生できる空気力も少ない、この駆動系の高速性も必要となってくる。 学習については、焼きなましの効果により正解率を高めることがでた。また学習に高速応答性を持たせ、ホバリング時の位置制御を行なわせるといったことが今後の課題となる。 実際の羽ばたき運動による飛行を行なうためには、図16が示すような関係、羽ばたき運動の消費電力と発生空気力曲線が、モータ重量出力動力比曲線を超える動力の発生を可能とする、羽ばたき機構の完成が必要となる。 | ||||
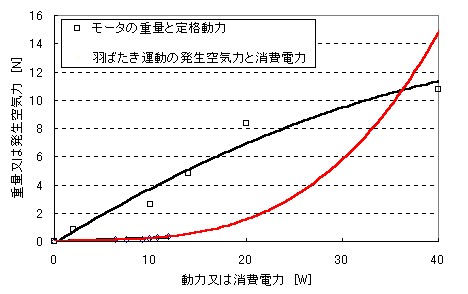 | ||||
| 図.16
実験データによる発生空気力と消費電力の関係とカタログ8)からモータ重量と出力動力の関係 | ||||
| 謝辞 | ||||
| 実験装置製作にさいし、ご指導、ご協力いただいた工作センター大西先生、長野先生に、また三分力ロードセルをお貸しいただいた溝田先生、および溝田研究室の方々に謝意を表する。 | ||||
| 参考文献 | ||||
| 1) ヘンク・テネケス:「鳥と飛行機どこがちがうか」,草思社(1999). 2) 東昭:「生物の動きの事典」,朝倉書店(1997). 3) 萩原将文:「ニューロ・ファジィ・遺伝的アルゴリズム」,産業図書(1994). 4) 中野馨 他,cでつくる続脳の情報システム,啓学出版,(1992). 5) 加藤寛一郎, 今永勇生著:「ヘリコフ゜タ入門」,東京大学出版会,(1985). 6) 萩原将文:「ニューロ・ファジィ・遺伝的アルゴリズム」,産業図書(1994) 7) 小林、亀山、森川:日本機械学会2001年度年次大会講演論文集(Ⅵ),No.01-1,pp 135-136 8) 「MOTOR&DORIVERversion5」,澤村電気工業株式会社 | ||||
| 現在までの研究業績 | ||||
|