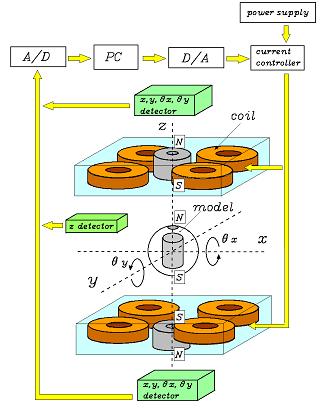
Fig.1 MSBS for wind tunnel experiments
CM02004 呉 鍾彬
1.緒言
3次元模型の風洞実験を行う場合には支柱やワイヤ等により模型を支持する必要がある。この状態で風洞実験を行うと気流と支持装置とが干渉し、流れには支持部の影響が現れる。この問題を解決するために考案されたのが磁力支持天秤装置である。
我々は1997年から研究を開始し、現在5軸制御まで可能な磁力支持天秤装置の開発に成功している。この装置は測定部が高さ36cm、幅40cmであり、野球ボール程度の大きさの模型で風洞実験を行うことを想定している。最終的には6軸総ての制御を目標としている。
本報告では本装置の力較正試験を行い、昨年度の結果と比較する。較正試験結果を元に位置姿勢検出部の精度を再確認し、補正を行った上でステップ応答における軸間干渉について述べる。
磁力支持天秤装置の構成をFig.1に示す。装置は主に、パソコン(PC)、電流制御装置、空芯コイル(外径180mm、内径140mm、厚さ20mm、255turn、インダクタンス6.89mH)、大型永久磁石(外径150mm、内径50mm、厚さ25mm、残留磁束密度1.066T、サマリウム系希土類磁石)、模型内部の小型永久磁石(直径35mm、長さ40mm、残留磁束密度1.35T、ネオジム系希土類磁石)及び、位置姿勢検出器から構成されている。
磁力支持天秤装置で使用する模型には小型永久磁石、もしくはそれに代わるものが内臓されており、模型は測定部の上下に設置されている大型永久磁石の磁極により測定部中心で重力が釣合い、測定部内の磁場を制御することで支持される。磁場は大型永久磁石の周囲に設置されているコイルに電流を流すことで制御される。
各コイルに供給できる電流は±10Aの範囲である。位置姿勢制御はX、Y、Z、θx、θy軸の合計5軸の制御まで可能である。模型の制御方法には5軸それぞれに対してPID制御を用いる。
2.2 実験方法
2.2.1 静的力較正試験
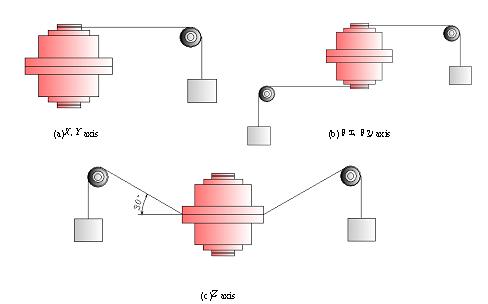
磁力支持天秤装置を使用する風洞実験において模型に作用する空気力を測定するには、予め実験前に軸単位で模型に作用する磁気力とコイル電流との関係式を求めておく必要がある。この作業は一般的な天秤装置の力較正試験と同じである。過年度の実験結果と比較するため祭再実験を行った。力較正試験はFig.2の様に直接模型に重りを吊り下げ既知の力を模型に作用させ、その時のコイル電流を測定して関係式を求める方法で行った。
2.2.2 位置姿勢検出器の較正試験
模型の位置姿勢検出の方法として、Z軸は模型の上端に水平にレーザー光を照射し、その対面にある光検出器の値の変化から検出する。X、Y軸の位置姿勢検出は模型の上下側の中心に直径3mmの反射シールを貼り、その部分に集光レーザー光を照射し、その反射光を4分割光検出器に受けさせ検出する。より高精度な検出を行うだめに感度は3次感度曲線で求める。
2.2.3 ステップ応答における軸間干渉
実際の制御では理論通りに模型に磁気力が作用することはなく、例えばY軸方向に磁気力を作用させるとθx軸にトルクが生じてしまうなどの干渉が生じる場合がある。この軸間の力及びトルクの干渉は即ち、天秤の測定誤差として現れる。従って、軸間の干渉の度合いを調べておく必要がある。
Z軸の制御系には制御周期6.3ms、比例ゲインKP=17.7、微分げインKD=-0.57、積分ゲインKI=0.02を、X、Y軸には制御周期6.3ms、比例ゲインKP=13.2、微分げインKD=-0.53、積分ゲインKI=0.011を、θx、θy軸には制御周期6.3ms、比例ゲインKP=6.6、微分げインKD=-0.11、積分ゲインKI=0.31を用いる。各軸についてステップ応答の測定を行うことにより、PID制御による制御精度と軸間干渉が明らかとなる。
3.実験結果
昨年度の力較正試験結果と再実験を行った結果をTable 1 に表し、Fig.3にZ、X、Y軸位置姿勢検出器の較正試験結果を示す。
| Formerdata | Axis | Z[N] | X[N] | Y[N] | θx[N・m] | θy[N・m] |
| Support range | ±0.6 | ±0.8 | ±0.8 | ±0.06 | ±0.06 | |
| Standard deviation | 0.00142 | 0.00076 | 0.00156 | 0.00028 | 0.00024 | |
| Presentdata | Axis | Z[N] | X[N] | Y[N] | θx[N・m] | θy[N・m] |
| Support range | ±0.4 | ±0.6 | ±0.6 | ±0.03 | --- | |
| Standard deviation | 0.00081 | 0.00117 | 0.00302 | 0.00013 | --- |
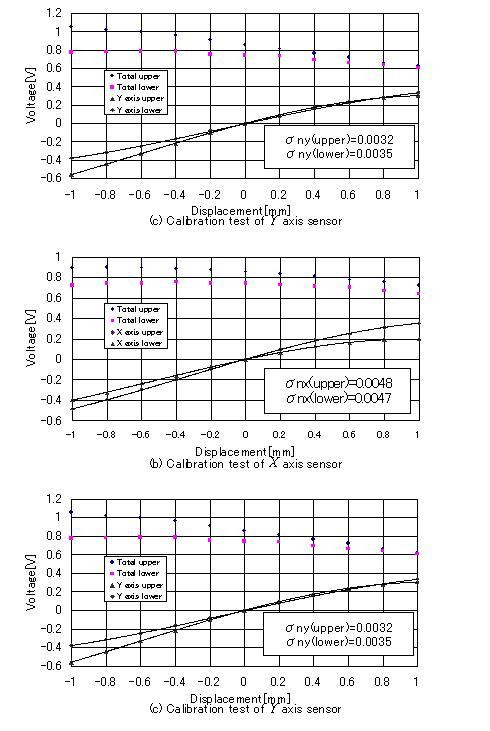
Fig.3 Calibration test of position sensor
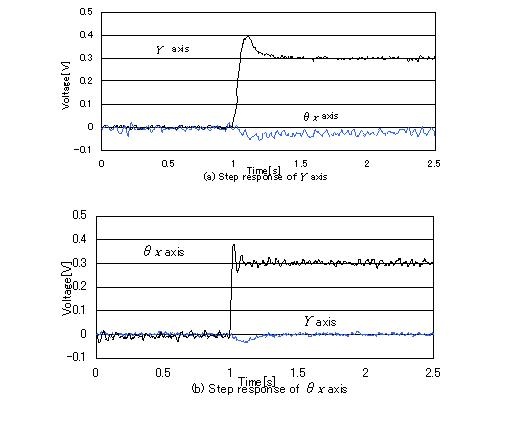
6軸制御を行う前段階として、5軸制御磁力支持天秤装置において再度、力較正試験を行った。その結果、全軸において制御できる支持範囲が減少していることが分かった。それを補正するために位置姿勢検出器の較正試験を行った結果X、Y軸で光検出量の割合が異なっている為、制御プログラムで強制的に補正を行った。この補正により磁力支持天秤装置の軸間干渉を取除けることが考えられ、位置姿勢検出器の補正を行った上で各軸ステップ応答の測定を行った。ステップ応答の測定を行うことにより軸間干渉が明らかになると考えられる。この様な結果は、位置姿勢検出器の補正を線形的に行った為である。ステップ量が0.3[V]になると模型の移動量は1[mm]程度となり、位置姿勢検出器の較正試験結果より、移動量が増加するに連れて非線形的になることが分かる。これを補正することにより、軸間干渉も補正されると考えられる。
5.結言
軸間干渉は、本装置の中で最も重要な検討事項であり、今後6軸制御を行う為にも、位置姿勢検出器の補正を行い、その発生の原因を明らかにする必要がある。