What is blindfolded flight?
The term blindfolded flight refers to the ability of a drone to automatically
follow a predetermined flight route using only internal data, even in an
environment where external positioning systems are spoofed/jammed/rejected.
This is the ultimate solution, providing permanent drone protection against
known and unknown attack methods originating from external sources.
Is the blindfolded flight feasible?
Yes!
This holds potential to significantly expand the range of drone applications.
What is the current state of the blindfolded flight?
We have developed a practical blindfolded flight system featuring high
speed (every 0.2 second output), flexibility (the same training weights
for both simulation and real measurement datasets), and adaptability to
counter GPS attacks, sudden gusts, and bird collisions.
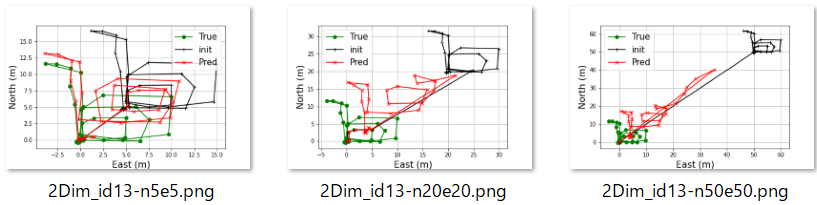
The following figures demonstrate the blindfolded filight route (red) using
(upper) SITL simulation and (lower) real measurement datasets.
The green dots are true positions. All figures are obtained with the same
weight parameters, which were trained with only 30 flight data.
Even if a false GPS signal suddenly causes the GPS position (black) to
deviate from the correct route (green), the blindfolded flight route (red)
can quickly approach the correct route (green).
The following illustrates the adaptive behavior. A false signal is transmitting
positions (left) 5 (middle) 20 (right) 50 meters north and east of the
correct route (green).