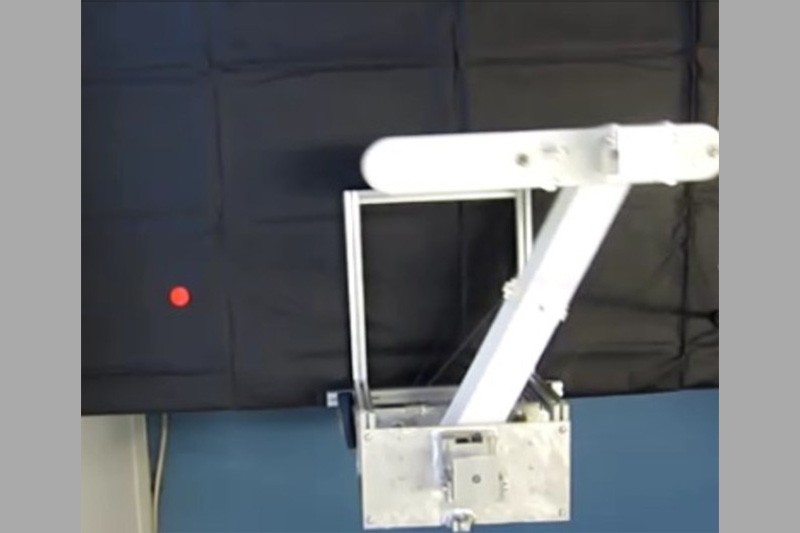
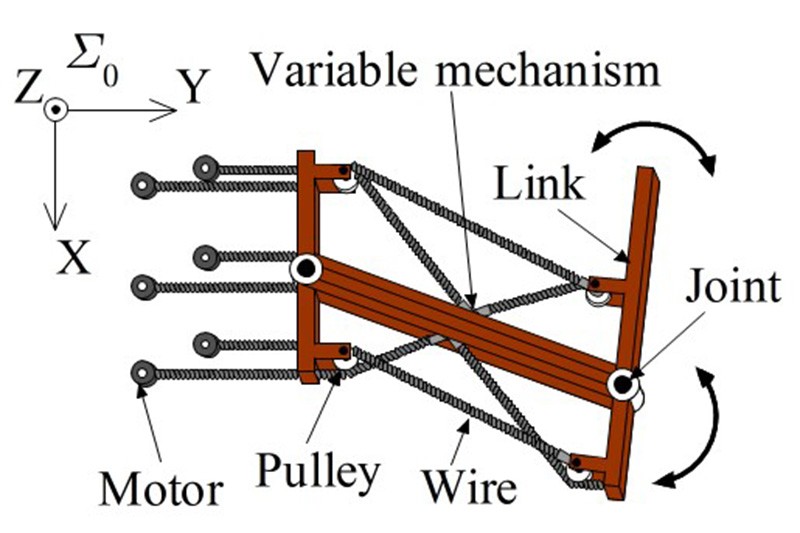
ホーム 松谷研究室 松谷研究室 教員紹介 松谷 祐希 准教授 研究者情報 筋骨格システムのモデル化と制御に関する研究 腱駆動ロボットに関する研究 パラレルワイヤ駆動ロボットに関する研究 専門 制御工学 所属学会 日本機械学会,日本ロボット学会,IEEE 研究室情報 研究室HP 研究室紹介 本研究では、人体特有の構造が人間の運動に寄与することを明らかにし、ロボットの制御性能を向上させるための研究を行っています。 人間のように関節の剛性を調節し、状況に応じた多様な運動を実現するため、リンク上に可変剛性機構を有する腱駆動ロボットを開発しています。 研究室一覧に戻る