曹研究室
教員紹介
曹 晟 准教授
研究者情報- 人支援ロボットのためのシステム制御と知能化
- 身体運動計測・生体力学解析に基づく動作評価
- リハビリロボットと介護支援ロボットの開発
- 逐次逆最適制御による人の意図理解とデータ駆動制御
| 専門 | 計測工学, 制御工学,ロボティクス,機械工学,生体力学解析 |
|---|---|
| 所属学会 | 計測自動制御学会,システム制御情報学会,IEEE |
研究室紹介
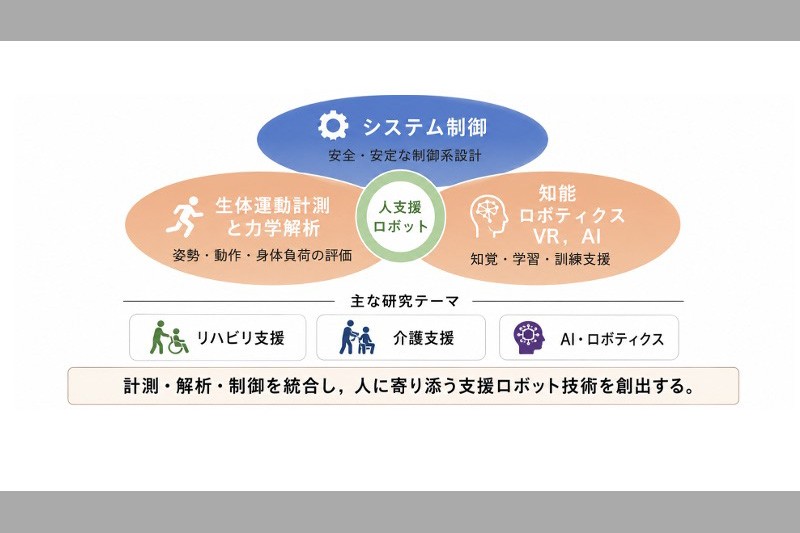
本研究室では,システム制御,生体運動計測・力学解析,知能ロボティクスを基盤として,人支援ロボット技術を研究しています。リハビリ支援,介護支援,AI・ロボティクスなどを対象に,計測・解析・制御を統合し,安全で適応的な知能ロボットシステムの構築に取り組んでいます。
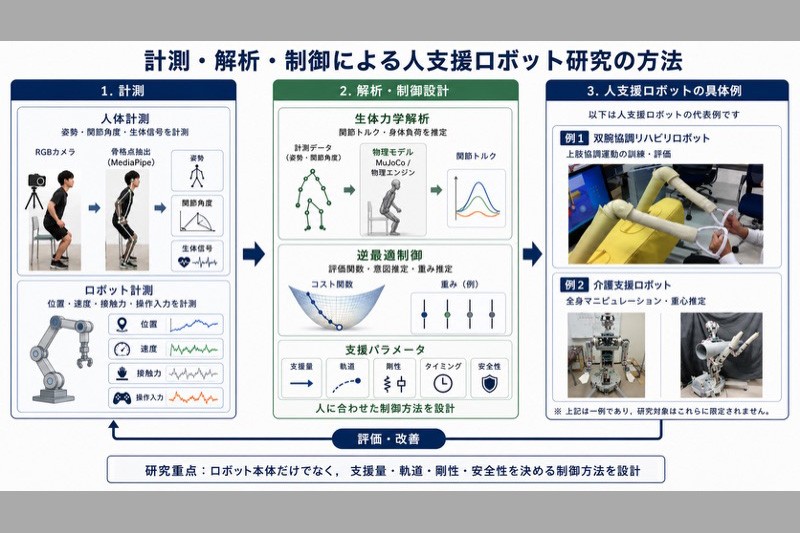
人とロボットの動きや力を計測・解析し、生体力学や逆最適制御を用いて、一人ひとりに適した支援パラメータ(軌道、剛性、タイミングなど)を設計します。これにより、リハビリや介護に役立つ「人に合わせたロボット制御」の実現を目指しています。
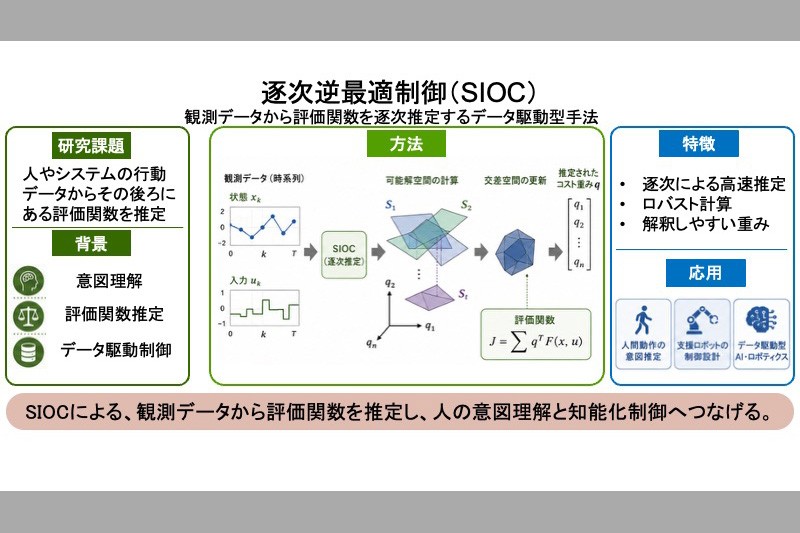
逐次逆最適制御(SIOC)は、状態・入力データからコスト重みを逐次推定し、解釈可能な制御設計を可能にする手法です。人の意図理解をはじめ、支援ロボットやデータ駆動型AI・ロボティクス分野への応用を目指します。
