23−1.(WMV形式)
飛行中の位置変更 その1
23−2.(WMV形式)
飛行中の位置変更 その2
23−3.(WMV形式)
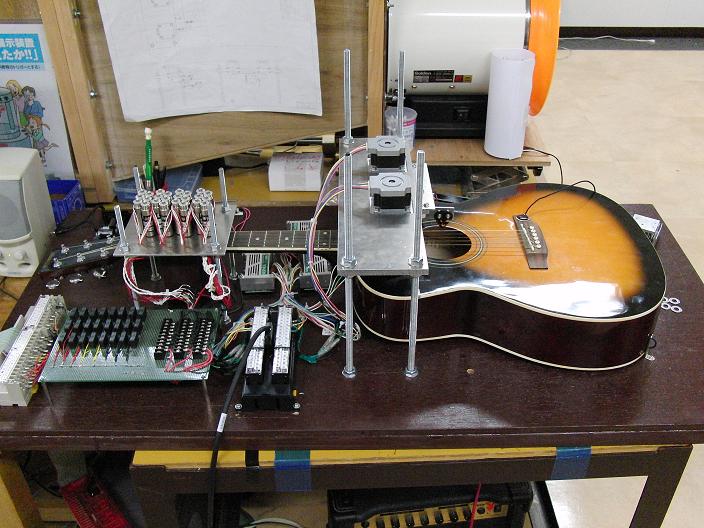
自動演奏ギターの高性能化
22−1.(AVI形式)
22−1.(WMV形式)
自動演奏ギター(レイラ→夜空のムコウ)
21-1.
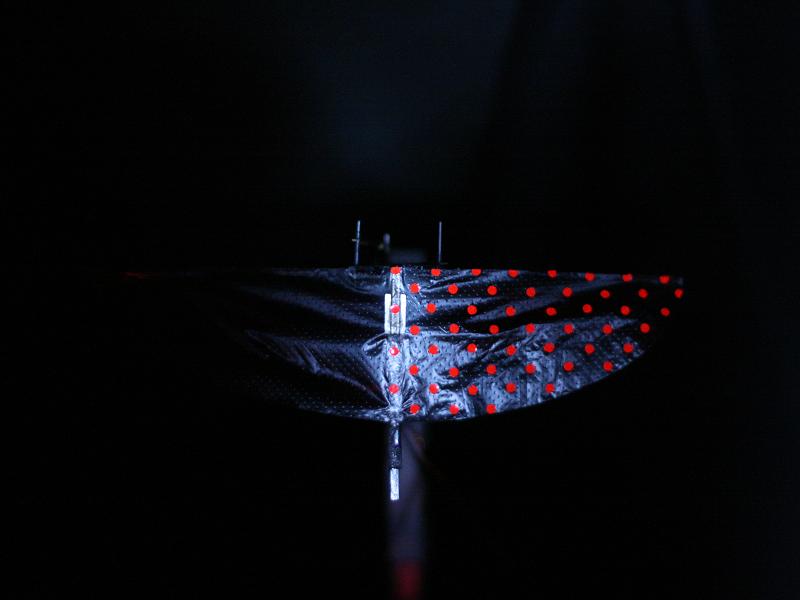
風洞内でのI-wingの渦の可視化 AVI形式
21-2.
風洞内での2枚翼羽ばたき飛行機の渦の可視化 AVI形式
20-1.
2枚羽ばたき翼の解析のための撮影動画 AVI形式
(ハイスピードカメラによる撮影
19-1.
ストロボ照射とディジタルカメラによる羽ばたき運動の高解像度撮影(avi形式版)
19-2.
輝点のトラッキング(avi形式版)
18-1.
ストロボ照射とディジタルカメラによる羽ばたき運動の高解像度撮影
18-2.
輝点のトラッキング
18-3.
ワイヤーフレームによる翼膜の動作の表現
17-1.
17-2.
蝙蝠形羽ばたき機(17-1)と通常の二枚翼機(17-2)の羽ばたき動作
蝙蝠形は打ち下ろし時の翼のめくれが抑制されていることがわかる。
16-1.
16-2.
蝙蝠形羽ばたき機(16-1)と通常の二枚翼機(16-2)の飛行時の煙による流線(250フレーム/秒)
15-1.
15-2.
蝶型羽ばたき機の飛行(250フレーム/秒)
羽ばたきをさせた場合(15-1)と
羽ばたき無し(翼固定)の場合(15-2)
14-1.
14-2.
14-3.
14-4.
風洞内で飛行する羽ばたき飛行機時の煙による流線(250フレーム/秒)
機体:固定、流線位置:翼端(14-1)
機体:固定、流線位置:機体中心から50mm(14-2)
機体:無支持、流線位置:翼端(14-3)
無支持、流線機体中心から50mm(14-4)
13-1.
13-2.
13-3.
風洞内での位置制御の様子 2007・11
13-1.:羽ばたき飛行機(高速度カメラによる撮影、250フレーム/秒)
13-2.:羽ばたき飛行機(通常の撮影)
13-3.:固定翼機
12-1.
昆虫サイズの4枚翼羽ばたき機の飛行、2006
12-2.
昆虫サイズの4枚翼羽ばたき機の飛行、2006
動画後半、地面効果により這うように飛行しています。
11.
4枚翼羽ばたき機の飛行、2006
10.
電動羽ばたき飛行機の初飛行、2005
9.
効率的な推力の出し方を学習する撓り翼2自由度羽ばたきロボット
8-1.
8-2.
効率的な推力の出し方を学習する2自由度羽ばたきロボット
8-1.:学習し始め
8-2.:学習し終わり
7-1.
7-2.
効率的な推力の出し方を学習する3自由度羽ばたきロボット
7-1.:学習し始め
7-2.:学習し終わり
6-1.
6-2.
6-3.
魚ロボットが泳ぎ方を学習しながら遊泳している
6-1.:2号機
6-2.:3号機
6-3.:4号機 (データ不明)
5.
磁力支持天秤装置による円柱の浮上(6軸制御)
4.
磁力支持天秤装置による円盤状模型の浮上(5軸制御)
磁力支持天秤装置による球体の浮上(5軸制御) (ビデオ後半部分)
3.
マイクロ立体レーザー加工で作った微小な風車を空気軸受けで浮かせながら高速で回転させている 2002
2-1.
2-2.
マイクロ立体レーザー加工で作った微小な球体を使った加工台の精密な軸合わせ
2-1:軸があっていない時
2-2:軸合わせ完了後
1-1.
1-2.
マイクロ立体レーザー加工で微小な円柱を作っている 2002
1-1.:作り始め
1-2.:作り終わり