1. はじめに
本研究では、魚の運動機構と運動パターンを模倣することにより優れた水中推進機の開発を目的する。今回は魚の運動機構を模倣したロボットの構造、制御システム、遊泳実験について報告する。
2. 実験装置
2.1 魚ロボットの基本構造
今回の魚ロボットは頭部コントロールユニット、駆動部ユニット、尾部パワーユニットの3つで構成されている。駆動部ユニットを複数つなぐ事で、関節部分を増加し、より複雑な遊泳が可能となる。各駆動部ユニットを制御する事により、魚の代表的な泳法であるウナギ型、アジ型、ハコフグ型の3種類の動きを模倣する事ができる。現在は駆動部ユニットが3つしかない為、関節が少なく、うなぎ型を模倣する事ができない。しかし、駆動部ユニットは全て同様の構造の為、これを新たに作成し、駆動部ユニットを追加する事でうなぎ型を模倣する事も可能である。
今回の魚ロボットは頭部ユニットが1つ、駆動部ユニットが3つ、尾部ユニットが1つで構成され、全長1080[mm]、高さ140[mm]、重量7[kg]で、尾部ユニットの尾鰭は、縦130mm横200mmの長方形で材質はポリエステルの長方形鰭である。全体写真を図1に示す。
2.2 運動制御システム及びデータ送信システム
図2の運動制御システムを示す。パーソナルコンピュータにD/A変換器を介してR/C送信機を接続し、運動制御プログラムによりサーボモータを制御する。また、測定データとして現在、魚型ロボットの遊泳速度、バッテリーの起電力を取得している。
取得を行うデータ送信モジュールは、4ポートの10bitA/D変換ポートを備えており、アナロク電圧を60msのサンプリング周波数で、データのサンプリングが可能である。しかし、送信データはアナログ電圧である必要があり、プロペラ式流速計の出力信号をF/Vコンバータにより、アナログ電圧に変換し、データ送信モジュールの入力ポートに入力している。

図1. 魚型ロボットの全体写真
2.3 学習プログラム
今回の学習プログラムは、ニューラルネットワークの山登り法を用いている。その内容は、まず最初に乱数で適当な初期値を与える。次に与えた初期値の一周期分の波形データを作成し、その波形データ通りに魚のサーボモーターを動作させる。この時の魚ロボットが遊泳している速度をバッテリーの電圧で割った値を平均し評価値とする。
試行一回目の場合は一回目の評価値を最大値とし、次は初期値にランダムに微小な変化を加え、魚ロボットより得られた測定データの評価値を判断する。この時、今回の評価値が今までの評価の最大値よりも大きければ今回の評価値を最大値とする。その後、初期値に微小な変化を与え同じように遊泳速度の測定、評価値の比較を順次行う。このプログラムのフローチャートを図3に示す。
図2. 運動制御システム
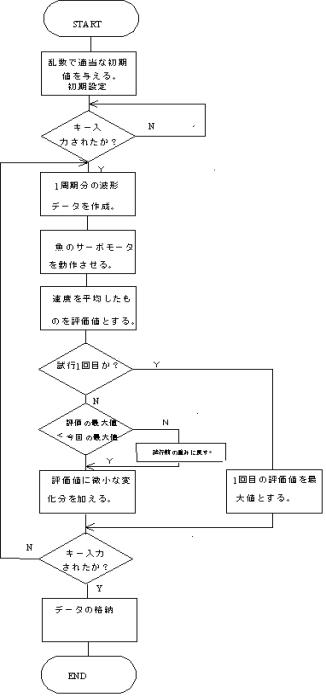
図3. 学習プログラムのフローチャート
4. 実験方法
今回の実験はおとめが池で学習プログラムを用いて各駆動部の駆動周波数を1Hzから1.8Hzまで変化させた時の遊泳速度の変化を測定した。試行回数は各周波数ごとに50回行い、遊泳速度を魚ロボットに設置したプロペラ式流速計により測定した。
5. 実験結果及び考察
各周波数の最大速度と周波数の関係を図4に示し、その中でも速度が最大である周波数1.2Hzの学習実験による速度の変化を図5に示す。この時の試行回数は140回である。
図4より周波数によって遊泳速度は変化し、周波数が1.2Hzの時に速度は最大になり1.2Hzよりも周波数が高くても低くても速度は遅くなる、この事より現在の尾鰭では周波数1.2Hzが最適だと思われる。また、図5より試行回数が多くなるにしたがって、速度は上昇、収束している事がわかる。実際に遊泳を観察していた時も実験開始に比べると実験の後半は遊泳がスムーズになり学習により成長しているように思われた。
6. 今後の課題
今回の実験はおとめが池での実験なので風の影響が大きいと考えられる、実験開始に比べると実験後半は電圧が減少している、この事より消費電力を評価関数に入れていないという点が実験結果に影響しているように思われるので、今後は消費電力も評価値にいれて実験を行う。
図4. 周波数と最大遊泳速度の関係
図5. 試行回数と遊泳速度の関係
参考文献
1) 中野馨 慶田誠 下平英寿 銅谷賢治「Cでつくる脳の情報システム」馨学出版 (1992年11月)
2) 永井實「イルカに学ぶ流体力学」オーム社 (1999年8月)