10キープログラミングロボット・ドローン・microbitの紹介ページ
Introduction of the numeric key programming robot and drone
2018/04/11 Open.2026/07/07 Update
( Maker Faire Tokyo 2018, 2020, 2022, 2024, Ogaki Mini Maker Faire 2022,
Maker Faire Kyoto 2020 向け)
Ogake Mini Maker Faire 2022 出展
Maker Faire Tokyo 2022 出展
Maker Faire Tokyo 2020 見送り
Maker Faire Kyoto 2020 出展許可の後,開催中止
Maker Faire Tokyo 2018 出展
目が見えない小学生でもプログラミングができるロボット・ドローン
・micro:bit教材
Numeric Key Programming: Programmable
Robot Kit for both Visually Impaired and
Sighted Elementary School Students
小学校から大学初年次まで使える福岡工業大学発のロボットプログラミング教材です.
Scratch のようなビジュアルプログラミングではなく,テキストプログラミングを
行います.
巷では,小学生にはテキストプログラミングはムリと言われてますが,
PCやスマホ不要で,小学 1年生でも 5分でプログラミング
ができるようになります.
盲学校での移動ロボットの実験授業では,
全盲の小学 3年生でも 15分でプログラミング
できるようになりました.
さわってロボットの形を知るのに時間がかかりますね.

Make Faire Tokyo 2018 でのハンズオンの風景 ( 未就学児から大人まで,
2日間で 127名がプログラミングを体験)
【10キープログラミングロボット KOROBO (コロボ)】
Numeric key programming robot KOROBO



↑「10キープログラミングロボットの外観」,
「みんなでシンクロナイズドロボットダンス」,
「ライントレース.小さい子も自分でプログラムを入力します.30秒くらいで」
- 「エレキット」ブランドで有名な福岡のイーケイジャパン社製のロボット玩具
KIROBO(キロボ) / KOROBO(コロボ) のArduino 版
のソフトウェアを改造したロボット。
(KIROBO / KOROBO の改造ならびに意匠利用については,
イーケイジャパン社の許可を頂いております.
なお,2018年10月に後継機 KOROBO2 が発売されました.)
- CPU ( マイクロプロセッサ):Atmel社が製造しているRISC (リスク
縮小命令セットコンピュータの意味。現在の世界標準) ベースの
8bitマイクロコントローラ.
- CPUボード:オープンソースハードウェアの Arduino.
C言語風のArduino言語と統合開発環境が付いてくる.でも,
ちょっと難しいので,使わずに済ませます.
- センサ:タッチセンサ2個,光センサ2個.他に出力としてブザーとLEDを
備えています.
- 独立2輪駆動:左右2個の車輪の回転方向を変えることで、
前進や後退、回転が可能。
- ロボットプログラミングでは,「基本命令と逐次処理」,
「制御命令(繰り返し)」,「制御命令(条件判断)」の3つを順に行います.
制御命令(条件付き繰り返し)も実行可能です.
- 【ファームウェアの公開】
10キープログラミングKOROBO用ファームウェアおよびインストーラの
全部入りファイル ( firmware for KOROBO-Arduino)
(Windows用 自己解凍型)を公開しています.
KOROBO / KIROBO の光センサには,赤色 LED版と白色 LED版があり,
ファームウェア内で閾値を違えています.対応する方をインストールして下さい.
【10キープログラミングロボット KOROBO2 (コロボ2)】
Numeric key programming robot KOROBO2


- KOROBO の後継機種である
KOROBO2 ( MR-9192)
の
マイコンボード ( MR-9192PCB)
を勝手に Arduino 化しました.
これにより,よりコンパクト,かつ,追加部品最少で 10キープログラミングが
可能になりました.もちろん,Arduino IDE でもプログラミングできます.
(マイコンボードの Arduino 化,および VID, PID の使用については,
イーケイジャパン社より許可を頂きました.)
-
紹介画像は,KOROBO2のマイコンボードと10キーパッドが分かるように,懐かしの
マイコントレーニングキット ( TK-80)
風に組み立てたものです.TK-20 ( Ten Key 2020)ということで.
TK-20 の特徴は,データ入出力のために,他の機器を必要としないことです.
現在,他社のプログラミングキットの多くはデータ入出力を行うために,
シリアル通信機能を備えた端末装置(パソコンやスマホ)を接続する必要があります.
それに対し,TK-20は,10進入力キーパッドと各種入出力機能を基板上に備えており,
端末装置なしでシステムを使うことができます.
(Wikipedia の解説のまねっこ)
-
KOROBO2 オリジナルのマイコンボードですが,Arduino 化しなくても
Arduino IDEで開発可能なことが分かりましたので,
このページ ( korobo2.html)で紹介しています.
Palette IDEを卒業した高校,大学,大人の皆さん,Arduinoに挑戦してみませんか?
【ファームウェアの公開】
KOROBO2 キットを10キープログラミング化するファームウェアとインストール方法も
全部入りファイル ( firmware for KOROBO2)
として公開しています.
-
2021/08/07 サイエンスフェスタ2021 in FIT にて,多数台の KOROBO2 SP および
CoDrone Pro をお披露目予定 => ビデオで公開中.
- [NEW] KOROBO2 の後継機種 KOROBO3 でも
ファームウェアはそのまま利用できることを確認しました.
全部入りファイルに KOROBO3 用のバッチファイルを追加しました.
【10キープログラミングドローン CoDrone (コードローン)】
Numeric key programming drone CoDrone

 ドローン本体とキーパッド付きリモコン
ドローン本体とキーパッド付きリモコン

 説明書を見ながら,先生に聞きながら,プログラミング.後ろには虫取り網?
説明書を見ながら,先生に聞きながら,プログラミング.後ろには虫取り網?





 その場で声に出しながらプログラミングして,その場でドローンを飛ばす
その場で声に出しながらプログラミングして,その場でドローンを飛ばす
 時には,プログラムミスしたドローンを虫取り網で捕獲.安全対策も万全です.
時には,プログラムミスしたドローンを虫取り網で捕獲.安全対策も万全です.
- トイドローンの一つである
CoDrone Pro ( ROBOLINK社)
の Arduino リモコンに10キープログラミング環境を移植しました.
- PCやスマホ,タブレット等を一切使わず,ドローンキット本体のみで
プログラミングできる最小,超簡単なプログラミング環境です.
プログラミングの説明書は A4 用紙たったの一枚.
- リモコンにはジョイスティックも付いていますので,プログラミングと
手動操縦を同時に行うこともできます.
また,教育用ドローンとしてよく用いられている Tello EDU とは異なり,
特別な操作をせずに複数台の同時利用・同時飛行が可能です.
- このドローンは,指でつまめるサイズなので,目が見えない子どももその動きを
体感できます.2020/12/11 に
福岡盲学校で小学生 6名のロボット・ドローンプログラミング教室
を実施しました.
 紹介している学内誌
紹介している学内誌
-
2021/12/26
福岡県古賀市図書館主催で「冬休み小学生プログラミング教室」
を実施しました.プログラミングドローン10台が同時に飛び交いました.
-
2022/11/05
新宮町立図書館の図書館祭りにて「小学生プログラミング教室」
を実施しました.新宮町内の小学生30人が参加し,
体育館のように広いホールで KOROBOと CoDrone で遊んでもらいました.
- 2023年度,2024年度は,本学サイエンスフェスタ,和白東公民館,
新宮町立図書館で実施しました.2025年度は,もう2ヶ所程増えそうです.
- [NEW]
ファームウェアおよびインストール方法の公開(準備中)
- 必要機材:
CoDrone Pro,
I/Oピン一つで読める4x4キーパッド,
ジャンプワイヤ(メス-メス 3本)
- ソフトウェア:ファームウェア, インストーラ(BATファイル)
- インストール方法:(CoDrone リモコンは組立て済みとします)
(1) リモコンの1つだけ空いているアナログポートにキーパッドを接続
(2) リモコン左上のDIPスイッチ1をONにして,ファーム書き込みモードに
(3) BATファイルをダブルクリックして,PCからUSB経由でファームウェアを転送
(4) DIPスイッチ1をOFFに戻す
- 技術資料:木室, 岩金, 家永, "10キープログラミング
-晴眼盲弱を区別しない ドローンプログラミング教材-", 情報処理学会
第83回全国大会, 2021 (情報処理学会電子図書館でもうすぐ公開)
【10キープログラミング 6足移動ロボットフォロ for micro:bit】

- PCやタブレットを使わずに micro:bit のプログラミングが行えます.
- 使用ロボットキット:
プログラミング・フォロ for micro:bit
- 日本機械学会 ROBOMEC2021 (2021/6/7)で発表.Maker Faire Tokyo 2022,
Ogaki Mini Maker Faire 2022 でも紹介しました.
- ファームウェア( hex ファイル)の試験提供
Firmware for Numeric key programming FOLO.
通常と同じく,この hexファイルを FOLOの micro:bit にコピーするだけでインストールは終わりです.
キーパッドは,I2C接続4x4キーパッド
のみに対応しています.I2C接続の工作がちょっと面倒なので,
とりあえずテストだけしたい方は,
I2Cのピンが外に出ているブレイクアウトボード
を間に挿すと良いでしょう(FOLO側面のA.Bボタン押しが使えなくなりますが).
FOLOの赤外線センサおよび micro:bit( v1.5)のすべてのセンサが
利用可能になっています(左右の光センサの検出距離は,ぞれぞれ10cmと5cm).
【10キープログラミング タミヤ クローラ型ロボット for micro:bit】
全国の盲学校に試験提供中.現在 46校(2025年度8月現在)

- パソコンやタブレットを使わずに micro:bit ( v1.5)
のプログラミングが行えます.
また,micro:bit 内蔵のほとんどのセンサが簡単に利用できます.
温度センサは MakeCode の標準のものより正確です.
データロガーと無線通信も実装済み.
micro:bit PC
がほぼ完成です.
- 使用ロボットキット:
マイコンロボット工作セット (クローラータイプ)
( TAMIYA microcomputer robot crawler type)
- SSS2021(2021/8/28-29),27th Robotics Symposia(2022/3/16-17)で発表
- テスト用ファームウェア
( firmware for micro:bit robot ( ver. 2025/09/29))
( You can download the firmware from here.)
注:ファームウェアの再配布はしないで下さい.
最新版に随時更新していきますので,
常にここからダウンロードするようにして下さい.
外部のイベント等でファームウェアを利用される場合は,
福工大 ( FIT) 開発物であることを明示して下さい.
なお,ファームウェアのバージョンは,[RESET]+[0]+[0]で確認できます.
現時点での最新版は,ver. 0.D です( 2025/09/29 updated).
新ファームでは,90度回転を精確に行うための調整コマンドを追加しています.
回転量調整と同時に直進移動距離もある程度,修整されます.
また,30度や60度回転にも変更可能です.
micro:bit v2 対応のファームウェアは,近日公開予定です.
( The firmware for micro:bit v2 will be available
soon
.)
-
 コマンドマニュアル&サンプルプログラム (
command manual & sample program written in English)
コマンドマニュアル&サンプルプログラム (
command manual & sample program written in English)
-
 TAMIYA マイコンロボットの絵本 ( PDF)
[NEW]
TAMIYA マイコンロボットの絵本 ( PDF)
[NEW]
- 改造手順(所要時間 3分くらい):
- 組み立て済の TAMIYA のロボット,
I2C接続4x4キーパッド(アイロジック),
六角樹脂スペーサ (M3 x 10mm 両側メス) x 2,ドライバーを用意する.
- キーパッドを付属のケーブルでロボットに接続.I2Cコネクタは,
ロボット前面の超音波センサの反対側
(か背面の電池ボックスをめくって左側).
ケーブルの接続順は,ロボットとキーパッドを向かい合わせて
並びの通りに.
前面のコネクタがゆるゆるだったら,基板の I2C コネクタをマイナス
ドライバー等で上にこじ上げて,超音波センサ基板の上から接続.
- キーパッドの手前側2つのねじ穴に 10mmのスペーサをビス止めし.
左側のスペーサをロボット上面のスイッチ左側の穴にビス止め.
ガタツキが気になるなら,ロボットキット付属の両面テープ
(リモコン用が多分,余っているはず)を縦方向に数mm幅で切り取って,
ロボット最頂部に貼って,基板を固定.
- 上に置いているテストファームをダウンロードし,この hexファイルを
micro:bit にコピー.
- 電源ONの後,[#]→[2]→[5]→[*] で前進したらOK.
- できれば,百均とかで直径 2mm以下のネイルシールや
デコシール
を買ってきて,キーパッドの [5]キーの上に凸.
- TAMIYAオリジナルファームウェア
に戻したい場合は,タミヤホームページ
「BBC マイクロビットのプログラムについて」中の
「出荷時のプログラムに戻すには」をご覧下さい.
-
2023/12/19 久留米市内の高校でプログラミングおよびIoT実験の授業を
実施しました.クラス40人が各自で無線センサ端末をプログラムし,
遠隔者の動作推定実験を行いました.この結果は,2024年3月の情報処理学会で
発表しました.
- [NEW]
2025/9/1 全国の盲学校 46校に TAMIYA 10キープログラミングロボットを
試験提供中.2023年度から開始しましたが,高評価により
2025年度も継続実施中です.
- 参考資料
[NEW]
【micro:bit PC ( マイクロビットパソコン) 】
micro:bit をノートPCにしました
 画像をクリックすると拡大表示します ( Click to enlarge).
画像をクリックすると拡大表示します ( Click to enlarge).
- パソコンやタブレットを使わずに,micro:bit 単体でプログラミングできる
手帳型の micro:bit PC ( micro:bit ノートPC)です.
以下の特徴があり,この micro:bit PC 単体で,どこでもその場で
プログラミングとセンサーデータの収集ができます.
- micro:bit のすべてのセンサをプログラム可能
コンパスセンサ(キャリブレーション作業不要.
方角は -180度から+180度の 3桁表示(スクロールなし))
明るさセンサ(閾値は自動判定)
加速度センサ( 3軸, 2G)
温度センサ( CPUの温度センサを用いていないため,標準のものより
精確です.温度は,整数部2桁,小数部1桁の 3桁表示 (スクロールなし))
- エッジ端子P0~P2の入力と出力をプログラム可能
- 無線通信可能(グループIDと送信出力も設定可能)
- データロギング可能(ファイルシステム内蔵)
micro:bit V1.5 にも対応
これと移動ロボットを組み合わせると,ラジコンシステムや
アクチュエータ有りの無線センサーネットワークが簡単に構築できます.
[NEW]
【10キープログラミング micro:Maqueen ( V3.0 - V4.2) with micro:bit V1.5 】
NeoPixelも付いている多機能 micro:Maqueen を10キープログラミング化


(左図) 手のひらサイズの移動ロボットを,
(右図) その場でライントレースプログラミング
- 全盲の小学1年生でも遊べる10キープログラミング環境を
DFROBOT 社の micro:Maqueen に移植してみました.
マイコンボードの micro:bit を搭載した移動ロボットですが,
MakeCode や Arduino IDE を使わずにコーディングができます.
TAMIYA のマイコンロボットにはない各種センサやデバイスも数字キーのみで
利用可能です.特徴的な機能は以下の通り.
- 移動や音,LEDアレイの基本命令の他に,制御命令の FOR文,IF文,WHILE文
がプログラム可能.IF文では ELSE も使えます
- 入力されたコードは自動的にフラッシュメモリにも記録.
次回電源オン時に自動読み込み
- コンパスセンサは, micro:bit 正立状態で動作.(例の)面倒な
キャリブレーションは不要です.その他のセンサは, micro:bit PC に
同じ
- データロギング機能(モード設定のみで動作.全てのセンサに対応.
電源オフでもログデータ保持.micro:bit V1.5 でも動作します)
- 無線通信(Radio)機能(モード設定のみでラジコンやセンサネットワークが
構築可能.V1.5 と V2 混在可.グループIDを設定しなくても動作)
- 左右のライントレースセンサ使用可能
(ただし,NeoPixel 利用時は,
P13 センサは,使用不可)
- 4つの NeoPixel の点灯および色相(RGBおよび中間色)の制御
(従来,Arduino IDE では実現困難とされていたもの.
参考サイト:非公式な Arduino ライブラリ
micro:Maqueen Library for Arduino )
- サーボ端子 ( S1, S2)でサーボモータ SG90 2個の制御が可能
( 0 度から 180 度まで)
【注意】最新版の micro:Maqueen V4.2 は,同じバージョン内で
ハードウェアが変更されており,NeoPixel が利用できない場合が
あるようです.
V3.0からV4.2まで,すべてのバージョンに対応しました.
V5は別ファームウェアで対応.- データロガーの時間調整にも使える,ディレイ命令を追加しました.
1秒単位,10秒単位,100秒単位で設定でき,
カウントダウン表示も行います.
- 90度回転を精確に行うための調整コマンドを追加しました.
- デモ動画(MP4 20MB ラジコン,ダンス with NeoPixel,無線データロガー)
(画像をクリックすると再生します)
 最新の動画は,Facebook や YouTube, X ( 旧 twitter) にもアップしています.
最新の動画は,Facebook や YouTube, X ( 旧 twitter) にもアップしています.
- ファームウェア(試験公開中 ver.0x0C)
test firmware for micro:Maqueen V3 - V4.2 with micro:bit V1.5
test firmware for micro:Maqueen V5 with micro:bit V2.0
【10キープログラミング ( 操作)の概略】
Outline of numeric key programming
- ロボット・ドローンに設置された数字キーによりプログラムを入力し,
実行します.
使うキー(覚えるキー)は, 0から 9のたった 10個の数字キーですが,
これでビジュアルプログラミングよりも簡単に直感的にテキストプログラミングを
行います.
- 数字キーの配列は,携帯電話のボタン配置と同じです.
[ 0]~ [ 9] と [*], [#]です.[ 5] キーには,目が見えなくても
( キーパッドを見なくても) 分かるように,凸が付いています.
- 入力した動作プログラムを実行させる場合は、実行ボタン [*] を押します.
プログラムの消去は,リセットボタン [#] を押します.
- 入力し実行したプログラムは,自動的に保存され,電源オフしても消えません.
再度電源オンで,そのまま実行できます.
(現在,KOROBO ( Arduino)系移動ロボットの場合のみ.
近日中に micro:bit ( v1.5) 用も公開します.ログ機能付き.)
10キープログラミング環境すべてで,コードの自動保存機能を実装しました.
- 文法チェックを行っていませんので,間違ったプログラム,むちゃくちゃな
プログラムもその通りに実行します.
プログラミングの失敗を楽しく簡単に経験することができます.
【プログラミングの流れと言語仕様】 Flow of programming
- 基本命令と実行
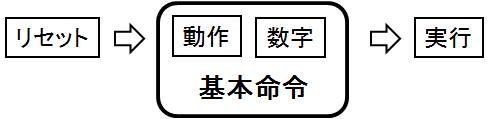
基本命令は,動きと数字の2つの組合せでできています.
動きは,前進,後退,左回転,右回転,音の5種類です ( 移動ロボットの場合).
ドローンの場合は,前進・後退,左進・右進,上昇・下降,左旋回・右旋回の
8種類とこれらの複合命令です.
逐次処理は,基本命令を繰り返すだけです.
- 制御命令:繰り返し FOR 文

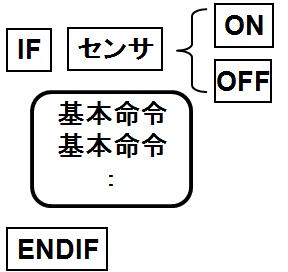
- 制御命令:条件判断 IF 文
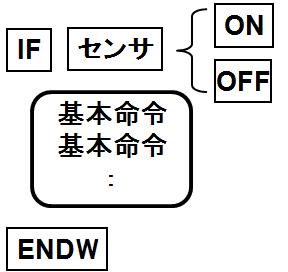
- 制御命令:条件判断付き繰返し WHILE 文
【プログラミング課題】 Challenges
- 課題:ロボットダンス ( Robot dance)
- 課題:障害物回避のプログラム(盲導犬ロボット)( Guide dog program)
- 課題:ライントレースのプログラム ( Line trace car)
- 発展課題:前方の壁に衝突したら,Uターンしてくるプログラム
- 発展課題:黒ラインからはみ出ない(白いテーブルから落ちない)ロボット
プログラム
- 発展課題:黒いラインで囲まれた土俵内で押し合う相撲ロボットプログラム
【デモビデオ】 Demonstration videos

ロボットプログラミングのデモビデオ
( mobile robot programming
( WMV file size 17MB 1 min)
ロボットプログラミングのデモビデオ
( mobile robot programming
( MP4 file size 3MB 1 min)
- ロボットの電源オン→電源ランプ点灯
- [#] ボタン押下でプログラムクリア
- プログラムの入力と実行:
テンキーパッドで [2] + [5] と押下し,[*]ボタンで実行.ロボットが,前進5
- プログラムの追加:
後退 [8] + [5] 押下でプログラム追加,ロボットは,前進5+後退5
- プログラムのクリア:
[ #] ボタン押下でプログラムクリアすると, [ *] 実行でも動かない
- 逐次処理:前進 + [5], 左回転 + [5], 後退 + [5], 右回転 + [5] で実行
- 繰返し: FOR[1] + 4, 前進 5, 右回転 4, NEXT[3] で実行.四角形を描く
- 条件分岐:(すみません,未だ,ビデオを撮っていません)
条件分岐は,IF と ENDIF が [7]と[9]キーに,左右のタッチセンサと
光センサが [1], [3], [7], [8]に割り当てられていますが,
未だ動画を撮っていません.
-
島原ICTクラブロボット競技大会ビデオ ( Youtube)
- ドローンプログラミングのデモビデオ
- ロボット・フォロプログラミングのデモビデオ ( 6 legs mobile robot)
 Obstacle avoidance
Obstacle avoidance
- TAMIYAクローラ型ロボットのデモビデオ ( crawler type robot)
 繰返し(四角形)(FOR statement),
繰返し(四角形)(FOR statement),
 障害物回避(超音波センサ)
(Obstacle avoidance),
障害物回避(超音波センサ)
(Obstacle avoidance),
 暗所で停止(光センサ)(light sensor),
暗所で停止(光センサ)(light sensor),
 転倒すると停止(加速度センサ)
(acceleration sensor)
転倒すると停止(加速度センサ)
(acceleration sensor)
参考文献:
- 家永, 寺岡, 木室, 沖本, "移動ロボットと携帯端末を用いた視覚障害のある
児童生徒のための コンピュータ機器の動作原理教育", 日本ロボット学会誌,
Vol.33, No.3, pp.164-171, 2015. (携帯電話を使ったプログラミング)
- 木室, 家永, "晴眼盲弱を区別しない初等プログラミング教材", 平成30年電気学会
全国大会, 2018. ( Arduino の10キープログラミング)
- 木室, 家永, 沖本, "晴眼盲弱を区別しない小学生向け非教育用プログラミング
言語とロボット教材", 日本機械学会ロボット・メカトロニクス講演会
ROBOMEC2018, 2018. (盲学校実験の報告)
-
木室, 牟田口, 酒井, 家永, "10キープログラミング教材による地域ICTクラブの
実践", 情報処理学会 情報教育シンポジウムSSS2019, 2019.
(第三者によるプログラミング教室の実施)
-
木室, 岩金, 家永, "10キープログラミング -晴眼盲弱を区別しない
ドローンプログラミング教材-", 情報処理学会第83回全国大会, 2021
( 10キープログラミングドローン)
- 古里, 木室, 家永, "10キープログラミング -PCを使わない micro:bit
プログラミング-", 日本機械学会ロボット・メカトロニクス講演会
ROBOMEC2021, 2021. ( 10キープログラミング 6足移動ロボット)
- 家永, 木室, "10キープログラミング教材の機能拡張とハードウェアの変更",
FIT2021, 2021. ( 1ボタンプログラミング)
-
木室, 古里, 家永,"晴眼盲弱を区別しない,PCを使わない micro:bit
プログラミング環境の提案", SSS2021, 2021.
( TAMIYA micro:bit ロボットとセンサ活用)
- 木室, 瀧内, 古里, 家永,"晴眼盲弱を区別しないmicro:bitロボット
プログラミング環境 -命令セットとセンサの改良-",
27th Robotics Symposia, 2022.
( FOR, IF, WHILE文 および micro:bitの全センサ利用)
- 木室, 瀧内, 古里, 家永,"10キープログラミングロボットシステム
-micro:bit によるデータロガーの実現-",
日本教育工学会研究報告集 JSET2022-1-B2, pp.64-69, 2022.
( micro:bit v1.5 でデータロガーの実装)
- 瀧内, 古里, 木室,"プログラム入力ログを用いた小学生に対する2進数学習の試み",
情報処理学会第85回全国大会予稿集, 2023.
( 小学生向け 2進数学習の実践報告)
-
木室, 古里, 瀧内, 家永,"micro:bit PC -10 キープログラミングによる
データロガーと無線通信-",
情報処理学会第85回全国大会予稿集, vol.4, pp.383-384, 2023.
( 追加コード不要のデータロガーと無線通信の同期実行)
- Y. Kimuro, T. Ienaga and S. Okimoto,
"Numeric Key Programming: Programmable Robot Kit for both Visually Impaired and Sighted Elementary School Students", Int. Conf. on Computers Helping People with Special Needs (ICCHP 2020).
- Y. Kimuro, T. Takiuchi, K. Furusato and T. Ienaga,
"Proposal of micro:bit PC Powered by Numeric Key Programming for both Visually Impaired and Sighted Elementary School Students", The 18th Int. Conf. on Computers Helping People with Special Needs (ICCHP2022) Part 1 pp.355-362, 2022.
参考アクセス数: