2026/01/09 更新
KOROBO2 および KOROBO3 の Arduino化に関する詳細紹介ページ
これまで,イーケイジャパン社製のロボット玩具
KIROBO (キロボ) / KOROBO (コロボ) の Arduino 版
を用いてプログラミングロボットを作ってきました.
今回, KOROBO の後継機種の
KOROBO2 ,
KOROBO3
を Arduino IDEで開発できるようにする試みをやってみましたので
紹介します.
ご質問があれば,kimuro@fit.ac.jp まで.
【10キープログラミングロボット KOROBO2 (コロボ2)】
【KOROBO2 / KOROBO3 の簡単な紹介】
- 「エレキット」ブランドで有名な福岡のイーケイジャパン社製のロボット玩具
- センサ:タッチセンサ2個,光センサ2個.他に出力としてブザーとLEDを装備
- 独立2輪駆動:左右2個の車輪の回転方向を変えることで、
前進や後退、回転が可能。
- 10キープログラミングでは,「基本命令と逐次処理」,
「制御命令(繰り返し)」,「制御命令(条件判断)」の3つを順に行います.
【KOROBO2 の Arduino化その1】
- KOROBO2のマイコンボード
MR-9192PCB
に Arduino ブートローダを載せて,勝手に Arduino 化しました.
これにより,よりコンパクト,かつ,追加部品最少で 10キープログラミングが
可能になりました.もちろん,Arduino IDE でプログラミングできます.
(マイコンボードの Arduino 化,および VID, PID の使用については,
イーケイジャパン社より許可を頂きました.)
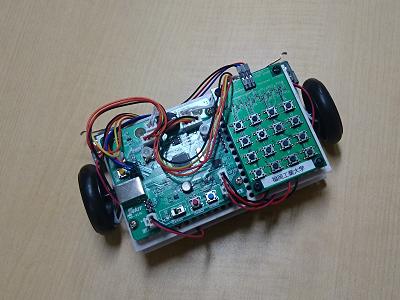
- 上の紹介画像は,KOROBO2のマイコンボードと10キーパッドが分かるように,
懐かしの
マイコントレーニングキット ( TK-80)
風に組み立てたものです.TK-20 ( Ten Key 2020)ということで.
- KOROBO2 マイコンボード用の Arduino ブートローダ FitKrb2.hex とその書き込み
手順は,公開準備中です.
AVR ライタには,
Atmel AVRISP mkIIを使用しています.
- Arduino IDE での開発手順は,以下の【Arduino化その2】の手順1~3と同一です.
【KOROBO2 / KOROBO3 の Arduino化その2】
←こちらがオリジナルに手を加えないのでおすすめ
- KOROBO2 / KOROBO3 オリジナルのマイコンボードに一切,手を加えなくても,
Arduino IDE の環境設定に追記するだけで開発可能なことが分かりましたので,
以下に紹介します.
なお,本手法を適用しても,オリジナルの Palette IDE の動作環境には
影響しないはずですが,もしこれで不具合が生じても
当方は責任を負えませんので悪しからず.
- マイコンボードの設定
Arduino IDE のボード設定ファイル boards.txt に,KOROBO2 ( fitkrb2)
を追記.
ファイルの場所: arduino-X.X.X\hardware\arduino\avr\boards.txt
追記内容: boards4KOROBO2.txt
- ピン情報の登録
Arduino IDE に KOROBO2のピン配置情報を登録.
ファイルの場所: arduino-X.X.X\hardware\arduino\avr\variants\ の下に
fitkrb2 というフォルダを作り,その中に以下のファイルを置く.
pins_arduino.h
- 開発
Arduino IDE メニューのツール→マイコンボードで fitkrb2 が選択可能
になっているはず.ピンの対応は,
KOROBO2 / KOROBO3 のサンプルプログラム(スケッチ)
を参照.
- hex ファイルの取得
Arduino IDEは,デフォルトでは,コンパイル後の hex ファイルを削除します.
メニュー→スケッチ→コンパイルしたバイナリを出力 でスケッチのフォルダに
hex ファイルを保存することができます.
なお,このメニューのないバージョンの
Arduino IDE や,コアが対応していないと叱られた場合は,
環境設定ファイルの preference.txt を修整 することで, hex ファイルが保存
できます.
- プログラム ( hex ファイル)の書き込み
KOROBO2 へは,コンパイル済みの hex ファイルを
hid_bootloader_cli.exe でコマンドライン ( コマンドプロンプト)
から書き込みます.
hid_bootloader_cli.exe は,Palette IDE のインストールフォルダの
palette_Vn_X_X\bundle_win の下にあります.
書き込みコマンドは,
hid_bootloader_cli.exe -mmcu=atmega16u4 -vid=12023 -pid=258 -n -v TARGET.hex
です.TARGET.hex を自分のプログラム名に差し替えて下さい.
なお,10キープログラミングKOROBOを作製するための
書込み用ファイル全部入りの圧縮ファイル 10key_KOROBO2.exe に KOROBO3 用の
BATファイルを追加しました.
( KOROBO3 の場合:
hid_bootloader_cli.exe -mmcu=atmega16u4 -vid=12023 -pid=265 -n -v TARGET.hex
)
おまけ:
Arduino IDE のメニューの「コンパイルしたバイナリを取得」で hex
ファイルを保存すると,スケッチのフォルダに [スケッチ名].ino.hex
が作られます.この場合は,
KOROBO2_Hex_set.bat のワンクリックで
対応する hex ファイルを自動的に KOROBO2に書き込むことができます.
同じフォルダに
hid_bootloader_cli.exe も
置いておきましょう.
ある方から,いろいろ質問されたので,サンプルプログラムとしてまとめてみました.情報に間違いがあるかもしれませんが,参考ということで.
KOROBO3 サンプルプログラム ( zip)
【KOROBO2 / KOROBO3 の10キープログラミング化】
KOROBO2オリジナルのマイコンボードにファームウェアを書き込むことで,
数字キーのみを使うテキストプログラミング環境が利用できるようになります.
Palette IDE はちょっと難しすぎるという小学1年生や未就学児さんでも
5分でプログラミングができるようになります.
1から9の数が分かれば大丈夫です.
用意するもの:
作業:
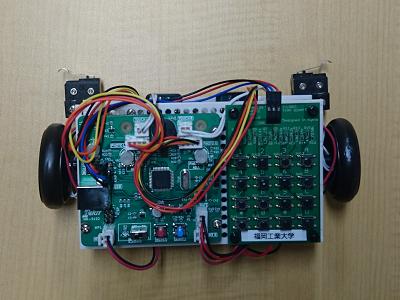
- KOROBO2 マイコンボードの CN4 に 8Pのピンコネクタを立てます.
マイコンボードの CN4 は,ハンダで埋まっていますが,ハンダを吸い取れば,
ピン穴が出てきます.KOROBO3 は最初から穴が空いています.
ピンコネクタを使わない場合は,2.へ
- 10キーパッドの VCC と GND, OUTPUT それぞれを CN4の 8Pコネクタの
3.3V, GND, 4番ピンへ.
マイコンボードのCN4は,スルーホールが空いていますので,4x4キーパッド付属の
ジャンプワイヤのオスをそのままハンダ付けすることもできます.
- 上の 10key_KOROBO2.exe を解凍し,中の 10key_KOROBO2_Hex_Set.bat
を起動(ダブルクリック)すれば,ファームウェアを自動書き込みします.
作業の詳細は,上の【KOROBO2 / KOROBO3 の Arduino化その2】の
5.プログラム ( hex ファイル)の書き込み の通り.
- KOROBO2 の電源を ON にし,キーパッド [#]→[2]→[5]→[*] で
前進したら,OK
参考アクセス数: