過去の卒業研究
2024年度 (第10期生)
<手指推定・表情認識>
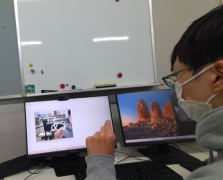
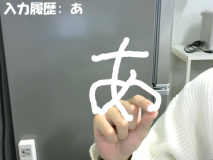
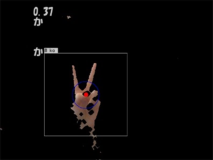
MediaPipe HandsとCNNを用いた空中手書き文字認識 (予稿)
[概要]
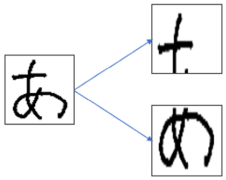
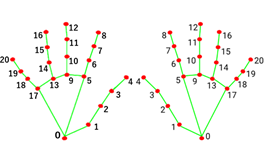
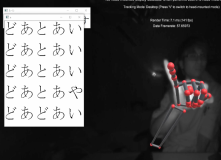
近年,新たな入力手法として空中に書いた文字を認識するシステムが提案されている.関連研究では,Kinectや加速度センサがついたデバイスを用いた空中文字認識システムが提案されているが,筆跡情報を取得できる機材は高価であり,入力デバイスが必要になるために使用環境も制限されてしまう.そこで,本研究では安価かつ広く普及されているUSBカメラのみを用いた空中手書き文字認識システムを提案する.まず,MediaPipe Handsを利用してカメラに向かって手を動かすことで文字の筆記を行う.そして,筆跡データを画像として保存し,CNNを用いて文字の分類を行う.また,似た形が存在する文字に対しては画像を上下で分割した学習モデルを用いることで分類精度の向上を図る.さらに,評価実験では未学習の人物に対しても高い認識精度が得られることを示す.
データ拡張による指文字画像の分類精度の向上 (予稿)

[概要]
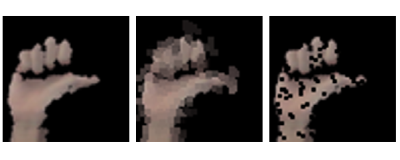
近年,聴覚障害者の手話の習得支援のために手話や指文字を認識するシステムが提案されている.関連研究では安価なUSBカメラで指文字を認識するシステムが提案されているが,この研究では未学習のユーザではあまりよい分類精度が得られていない.また,データ取得の段階で肌色抽出がうまくいかなかった場合にも,分類精度が低下してしまうことがある.そこで,本研究では指文字画像へのデータ拡張を行うことで,指文字画像の分類精度の向上を目指す.まず,撮影した指文字画像に対して既存のデータ拡張である回転,明るさ変更を行い,そこからさらに肌色マスクまたは黒色マスクを付加するデータ拡張を行う.それらの画像をCNNに学習させ,分類を行う.また,評価実験では,肌色や黒色のマスクを付加することで既存のデータ拡張のみの場合よりも分類精度が向上し,提案手法の有効性を確認できたことを示す.
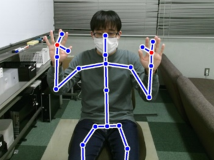
MediaPipeのブレンドシェイプ予測係数を用いた表情認識 (予稿)

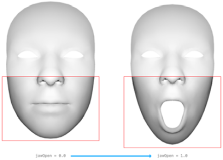
[概要]
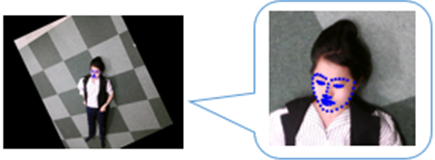
近年,画像処理技術の発展により,動画や画像から顔の特徴点などの情報を高い精度で取得することが可能になっている.また,オンライン会議の普及に伴い,感情を推定するための非言語的な情報の重要性がますます高まっている.関連研究では,Ekmanの基本6感情に真顔を追加した7表情を定義し,顔特徴点を用いて日本人の表情の特徴を分類する手法が提案されている.しかし,被験者間の分類精度のばらつきが大きいことなどが課題として挙げられている.そこで,本研究ではMediaPipeで取得したブレンドシェイプ予測係数を用い,Random Forestによって表情分類を行う手法を提案する. まず,7表情の顔画像データを撮影し,MediaPipeを用いて顔特徴点のx,y座標から52種類のブレンドシェイプを抽出する.抽出したブレンドシェイプから外れ値を除去し,表情のブレンドシェイプごとに0から1の範囲に正規化の処理を行う.そして51次元の特徴ベクトルを用いてRandom Forest で学習させ,7表情の分類を行う.男性3名の被験者に対して評価実験を行い,学習に本人のみの各表情画像200枚を用いた場合では平均で90%,各表情画像500枚の場合では平均で98%以上の正答率が得られたことを示す.
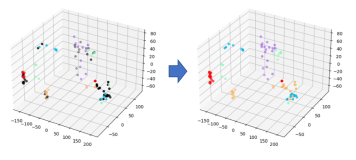
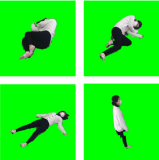
人物転倒姿勢の教師なしクラスタリングの改良 (予稿)
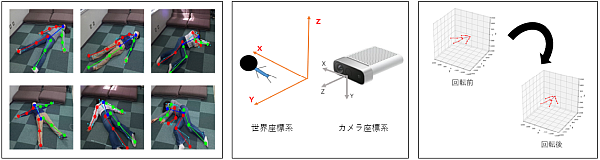
[概要]
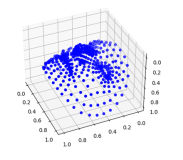
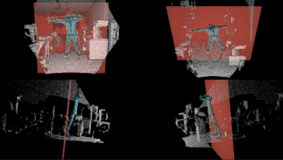
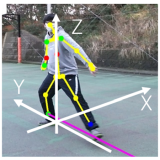
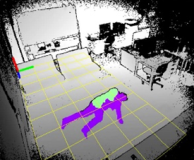
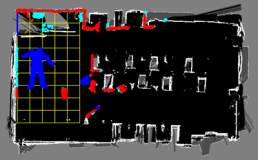
近年,独居高齢者の増加によって見守りシステムの需要が高まっている.先行研究では,Azure Kinectを用いて人物の転倒姿勢データを取得し,教師なし学習によって姿勢のクラスタリングを行う方法が提案されている.しかし,データの欠損や転倒方向の違いが姿勢分類に影響を与えるという課題も残った.本研究では,データ欠損箇所に対する線形補間と転倒姿勢の方向の統一を行うことで,より正確に人物の転倒姿勢を分類する方法を提案する.まず,Azure Kinectを用いて人物の主要関節である14箇所の3次元骨格座標を取得する.データの一部に欠損が発生した場合,姿勢はフレームごとに大きく変化していないことを前提とし,前後の正しく取得できたフレームの座標を使用して線形補間を行う.さらに,転倒方向の影響を受けず,正確なクラスタリンクを行うために転倒方向の統一を行う.具体的には,カメラ座標系から世界座標系に変換し,頭と腰を結ぶ線分がカメラに対して垂直になるように全骨格を回転させる.そして,評価実験により提案手法の有効性を確認したことを示す.
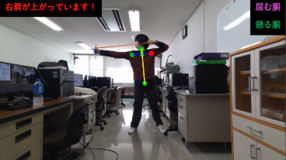
Azure Kinectを用いた歩行データ解析に基づく異常検出システムの開発 (予稿)

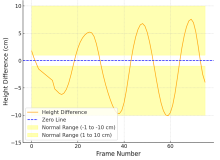
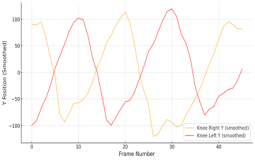
[概要]
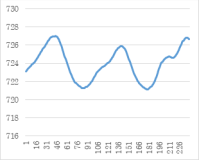
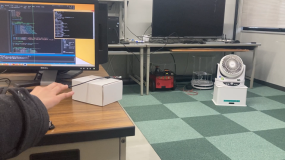
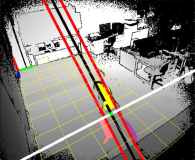
本研究では,Azure Kinectを用いた歩行データ解析に基づく異常検出システムを提案する.従来のモーションキャプチャは高精度であるものの,高価で設置が困難という課題がある.そこで,本システムではAzure Kinectの骨格トラッキング機能を活用し,足の高さ・歩幅・歩行速度・身体の左右対称性の4指標を解析することで異常歩行を検出する.データ補正にはデトレンド処理やクロスコリレーションを適用し,Pythonを用いたリアルタイム解析および可視化を実装する.評価実験では,正常歩行,片足引きずり歩行,小刻み歩行の3パターンを対象に解析を行い,提案手法の有効性を示す.特に,片足引きずり歩行において顕著な異常を捉えることができ,歩幅や歩行速度の変化も精度良く検出可能であることを示した.
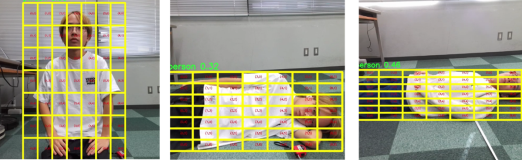
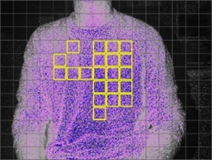
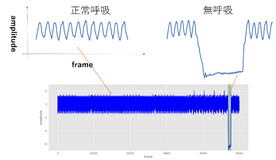
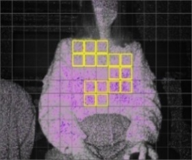
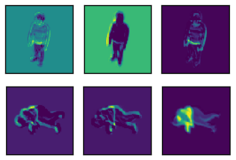
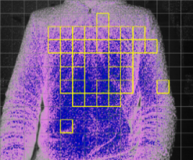
YOLOによる人物領域取得を用いた異常呼吸検知 (予稿)
[概要]
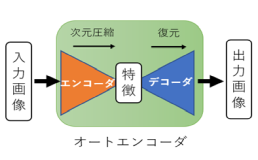
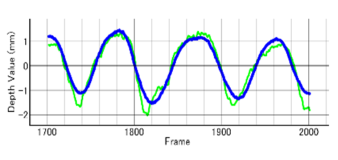
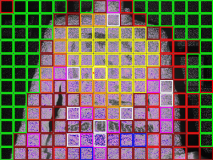
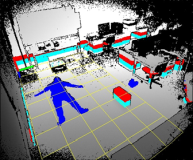
高齢化の加速に伴い,介護現場での安全管理を支援する見守りシステムの需要が高まっている.先行研究として,移動ロボットを用いて転倒人物に近づき,呼吸推定を行う見守りシステムが提案されている.また,Kinectで推定した骨格情報をもとに胸部の距離変動を測定し,オートエンコーダを用いてオンライン異常呼吸検知を行う手法も提案されている.しかし,対象者の骨格情報が取得できない場合にはシステムを活用することができないという課題が残されていた.そこで,本研究では撮影された画像からYOLOを用いて人物領域を取得し,オートエンコーダを用いて異常呼吸検知を行うシステムを提案する.まず,Azure Kinectで撮影した画像に対し,YOLOを用いて人物領域の取得を行う.そして,取得した人物領域を7×7の格子状に分割し,その中央付近を用いることである程度胸部の位置を特定する.次に,特定した胸部付近から呼吸波形の取得を行い,オートエンコーダに正常呼吸のみを学習させる.最後に,オートエンコーダの入出力の差から異常度を求め,閾値処理によって正常呼吸かどうかを判別する.評価実験では,体位と距離を変えて取得した波形に対して呼吸判別実験を行い,その認識精度を確認することで提案手法の有効性を示す.
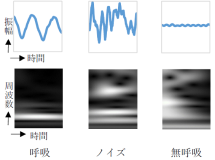
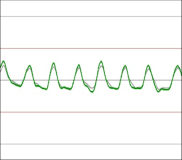
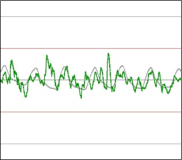
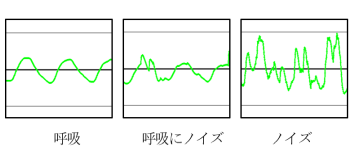
短時間フーリエ変換とオートエンコーダを用いた呼吸判別 (予稿)

[概要]
近年,独居高齢者の増加に伴い,見守りシステムの需要が増加している.呼吸推定の先行研究として,複数の画像化手法とオートエンコーダを用いて呼吸判別を行う手法が提案されている.しかし,周波数解析にウェーブレット変換を用いており,波形データの画像化に時間がかかることが課題であった.そこで,本研究では周波数解析に短時間フーリエ変換を用いて呼吸判別を行う方法を提案する.まず,Azure Kinectを用いて人物胸部の距離データとオプティカルフローデータを取得する.次に,画像化したデータをオートエンコーダに学習させ,入力画像と出力画像の差から異常度を算出する.最後に,一対他分類器を用いて呼吸判別を行う.評価実験として,短時間フーリエ変換とウェーブレット変換の認識精度及び波形データを画像化する際の処理時間を比較する.また,複数の画像化手法を組み合わせた場合や分類器を変更した場合の認識精度も比較し,提案手法の有用性を示す.
2023年度 (第9期生)
<見守りシステム>
ラベル伝播法を用いた大量データ活用による転倒姿勢分類の精度向上 (予稿)

[概要]
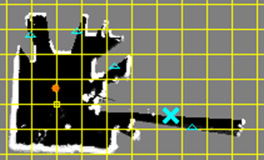
近年,独居高齢者の増加に伴い,見守りシステムの需要が高まっている.先行研究としてCNNやSVMなどの機械学習を用いて天井カメラ画像から転倒人物の姿勢を推定する手法が提案されている.しかし,より様々なバリエーションを含む転倒姿勢に対応するにはさらに大量の学習データが必要であり,高いアノテーションコストがかかることが課題点となっている.そこで本研究では,ラベル伝搬法を用いてクラスラベルを付与することでアノテーションコストを削減し,大量データを活用する方法を提案する.天井カメラで撮影した姿勢画像からOpenPoseで骨格点の2次元画像座標を取得し,腰を基準に相対座標化した14次元の特徴ベクトルを作成する.その特徴量を用いてラベル伝搬法によりクラスラベルの予測を行う.その後,予測ラベルを付与したデータを教師あり学習SVMやCNNの学習データとし,転倒姿勢分類を行う.評価実験の結果,少量のラベルありデータからクラスラベルを予測し,アノテーションコストを削減できることを確認した.さらに,教師あり学習であるCNNにおいて活用が見込める結果が得られた.
[発表論文]
● “半教師あり学習手法を用いた大量データ活用による人物姿勢判別の精度向上方法の提案”,電気・情報関係学会九州支部連合大会,10-2A-08,鹿児島,Sep. 2024.
見守りシステムのための教師なし学習を用いた転倒姿勢のクラスタリング (予稿)
[概要]
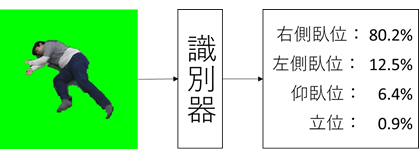
近年,独居高齢者の増加に伴い,見守りシステムの需要が高まっている.先行研究として,画像情報を用いてCNNで姿勢推定を行う方法や,画像から抽出した2次元の骨格情報を用いてSVMで姿勢推定を行う方法が提案されている.しかし,教師あり学習であるCNNやSVMの課題として,学習に膨大なアノテーションコストがかかってしまうといったことが挙げられる.そこで,本研究ではアノテーションコストのかからない教師なし学習手法を用いて転倒人物の骨格情報をクラスタリングすることが可能か検討を行う.まず,Azure Kinectで取得した14箇所の3次元骨格座標データを,腰を基準とした相対座標に変換し,特徴ベクトルを作成する.そして, 特徴ベクトルをk-means法,階層的凝集クラスタリング,混合ガウスモデル,DBSCANの4つの教師なし学習手法でクラスタリングを行い,姿勢分類の精度比較を行う.評価実験の結果,全ての手法で86%以上の分類精度が得られ,提案手法がアノテーションコスト削減に効果的であるということを示した.
Azure KinectとCNNを用いた転倒人物姿勢推定の精度向上 (予稿)


[概要]
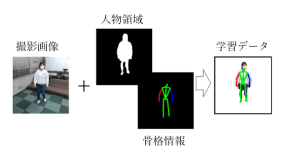
近年,高齢化により見守りシステムの需要が高まっている.本研究室では天井カメラで人物の転倒を検知し,移動ロボットによって人物の正面に近づき,呼吸推定を行う見守りシステムの開発が行われている.先行研究として,移動ロボットを人物の正面に移動させるため,天井カメラとCNNを用いて転倒姿勢を判別する方法が提案されている.また,人物画像に骨格線を描画することで認識精度を向上させる方法も提案されており,この手法では未学習の人物に対する認識精度は87%程度であった.そこで本研究では先行研究を改良し,転倒人物の姿勢推定の精度向上を図る.天井カメラにKinect v2よりも距離測定やスケルトンの推定性能が向上したAzure Kinectを用いる.Azure Kinectから取得した背景画像,人物画像,骨格情報を用いて背景の塗りつぶしや骨格線の描画を行う.また,より高い認識精度を得るため,骨格線の描画方法を変えて精度比較を行い,最も精度の高くなる描画方法を検討する.さらに,提案手法を用いた評価実験を行い,未学習の人物に対しても高い認識精度が得られることを示す.
Azure Kinectを用いたオンライン呼吸観測と異常呼吸検知 (予稿)

[概要]
近年,独居高齢者の増加や介護施設での人手不足などに伴い,見守りシステムの需要が高まっている.呼吸推定の先行研究としてKinectの距離情報から呼吸による胸の動きを計測する手法や,取得した波形データを用いて正常呼吸と異常呼吸を判別する手法などが提案されている.しかし,これらの研究の課題点として対応距離が狭い範囲に限られていること,処理が重くオンラインでは処理できていないことが挙げられる.そこで,本研究ではAzure Kinectを用いてデータを取得し,オートエンコーダを用いて異常呼吸検知を行う方法を提案する.まず,Azure Kinectで取得した距離画像の距離変動を波形データとして取得する.そして,波形データの切り出しを行い,切り出した波形データを正常な呼吸のみを学習させたオートエンコーダに入力して正常呼吸と異常呼吸の判定を行う.最後に,その異常検知結果をオンラインUIに表示させる.また,評価実験として距離と周期を変えて異常呼吸検知の精度を比較し,提案手法の汎化性能を示す.
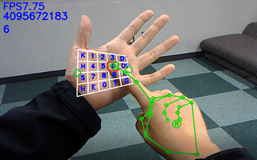
USBカメラを用いたAR環境における入力システムの改善 (予稿)

[概要]
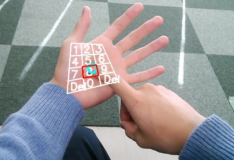
近年,装着型のデバイスの増加に伴い,安価かつ自然な操作手法の必要性が高まっている.先行研究では,USBカメラのみを使用して取得した情報を基に,掌の上に仮想キーボードを表示する入力システムが提案されている.しかしこの研究の課題点として,接触判定を単純な閾値処理を行っているため精度が低く,入力に時間がかかることが挙げられている.そこで,本研究では先行研究を改良し,課題点である接触判定に機械学習の手法であるSVMを用い,素早くかつ正確に文字入力できる方法を提案する.まず,MediaPipe Handsを利用して2次元画像から手を認識し,手の骨格情報を取得する.そして,このデータをもとに,SVMを用いて左手の掌と右手の人差し指が接触しているか否かの2クラス分類を行う.最後に,この接触判定を基に文字を入力する機能を実装する.評価実験では文字入力の速度と正確性についての検証や先行研究との比較を行い,提案手法の有効性を示す.
MediaPipe HandsとCNNを用いた手軽な指文字認識システムの提案 (予稿)

[概要]
近年,手話を習得していない聴覚障碍者や健聴者の学習のために手話や指文字を認識するシステムが提案されている.関連研究では,Kinectやデータグローブなどを用いて指文字を認識するシステムが提案されているが,これらの研究には使用機材が高価だという課題点がある.そこで,本研究では安価かつ広く普及されているUSBカメラのみを用いた手軽な指文字認識システムを提案する.まず,MediaPipe Handsを用いて手の座標を得ることで手領域画像を取得し,CNNを用いて動作のない指文字の分類を行う.また,手の動きを検知して動作のある濁音などの指文字の分類を行う.さらに,正面から見た形が酷似している指文字に対してMediaPipe Handsで指先同士の距離情報を用いることで分類精度の向上を図る.そして,評価実験として実際に指文字認識を行い,特に学習済の被験者においては清音で91.7%,清音以外で80%と十分に高い分類精度が得られたことを示す.
MediaPipe Face MeshとSVMを用いた表情認識 (予稿)

[概要]
近年,画像情報処理技術の発展により,動画や画像から顔の表情などの情報を抽出することが可能になっている.関連研究ではエクマンの基本6感情に基づいて表情の認識を行う手法が提案されている.しかし,エクマンの基本6感情の表情と日本人の表情が一致しないことが示唆された.そこで,本研究ではMediaPipe Face Meshで取得した顔の特徴量を用い,SVMによって日本人の表情を認識する手法を提案する.本研究で認識する表情はEkmanの基本6感情に真顔を追加した7クラスである.まず,MediaPipe Face Meshを用いて画像から顔の特徴量を取得する.抽出する顔の座標点の数は468点であり,それぞれの3次元座標を並べた1404次元の特徴ベクトルを作成する.なお,抽出した特徴量はx,y,z軸それぞれで正規化の処理を行う.表情の認識にはSVMを用いる.男性3名の被験者に対して評価実験を行い,本人のデータを用いて学習を行った個人モデルでは平均で90%以上の表情認識精度を得ることができたことを示す.
2022年度 (第8期生)
<姿勢推定>
見守りシステムのためのSVMを用いた人物の転倒判定 (予稿)



[概要]
近年,独居高齢者の増加に伴い,見守りシステムの需要が高まっている.先行研究として,画像情報のみを用いて転倒人物の姿勢推定を行う方法が提案されている.しかし,CNNの課題として,学習に姿勢や服装が異なる画像が大量に必要なことが挙げられる.そこで,本研究では画像から抽出した骨格座標を用い,SVMを用いて人物の転倒判定を行う方法を提案する.さらに転倒姿勢を4つに分け,それらの分類も行う.まず,OpenPoseを用いて画像から骨格座標を抽出し,SVMに用いる特徴ベクトルを作成する.特徴ベクトルは14次元ベクトルとし,安定して抽出できる7つの関節点を用い,腰を基準とした相対座標を用いる.そして,姿勢ごとにラベル付けした特徴ベクトルをSVMに学習させて転倒姿勢の分類を行う.また,評価実験を行い,立位と転倒姿勢の2クラス分類では100%の認識結果が得られ,転倒姿勢を細分化した5クラス分類でも95%以上の高い認識精度が得られたことを示す.
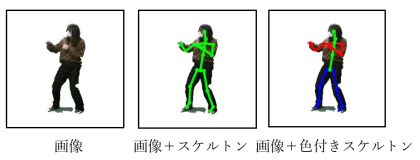
OpenPoseとCNNを用いた転倒人物姿勢推定の精度向上 (予稿)

[概要]
近年,高齢化によって見守りシステムの需要が高まっており,様々な見守りシステムが提案されている.本研究室でも天井カメラで人物の転倒を検知し,移動ロボットが転倒人物に近づいて呼吸推定を行う見守りシステムの開発が進められている.また,移動ロボットを人物の正面に移動させるための先行研究として,CNNを用いて転倒姿勢を判別する方法が提案されている.この手法では学習済みの人物に対しては8割と高い認識精度が得られているが,未学習の人物の左右側臥位の認識精度が他の姿勢よりも下がることが問題であった.そこで,本研究では転倒人物画像から骨格情報を取得し,画像にスケルトンを描画することで認識精度を向上させる方法を提案する.しかし,OpenPoseでは画像に対して頭部が下方にあると正確な骨格情報を取得できないため,画像を回転させることで骨格情報を抽出できるようにする.元画像に回転を加えた4枚の画像にOpenPoseを適用させ,最も信頼度の合計が高い画像を元画像と同じ方向に戻して出力する.また,高い認識精度を得られるスケルトンの種類について検討を行い,部位ごとに色を変更したスケルトンが高い認識精度を得ることを確認した.そして実際に提案手法の学習データをCNNに学習させて転倒姿勢判別の評価実験を行い,未学習の人物の左右側臥位に対して認識精度が向上することを確認した.
見守りシステムのための転倒人物の顔方向推定手法の検討 (予稿)
[概要]
近年,見守りシステムの需要が高まっており,様々なシステムが提案されている.先行研究として本研究室では天井カメラを用いて人物の転倒を検知し,移動ロボットが近づいて呼吸推定を行う見守りシステムが提案されている.しかし,Kinectから取得できる画像データでは人物の顔のエッジが荒く,転倒した人物の顔方向を正しく推定することができない.また,Dlib,OpenPoseの顔検出器では画像に対して頭部が上にない場合,顔が検出できない.そこで本研究では,天井カメラを高解像度USBカメラに変更し,解像度の問題を解消する.また,直立に近い姿勢になるように画像を回転させることで顔検出器の認証精度を上げ,顔方向を推定できるようにする方法を提案する.画像の回転にはOpenPoseの全身検知機能を利用し,骨格情報を元に胴体が垂直になるように画像を回転する.最後に,天井カメラ画像に対する顔方向推定の評価実験を行い,提案手法によって検出率の向上が確認できたことを示す.
ウェーブレット変換とオートエンコーダを用いた呼吸推定方法の提案 (予稿)
[概要]
近年,独居高齢者の増加に伴い,見守りシステムの需要が高まっている.呼吸推定の先行研究としてKinectの距離画像とCNNを用いて人物の胸の動きから呼吸推定する手法が提案されている.しかし,この研究の課題点として学習に大量の呼吸データとノイズデータが必要なことや,未学習者に対して認識精度が低下したりすることが挙げられる.そこで,本研究ではウェーブレット変換とオートエンコーダを用いて,呼吸データのみを学習させて呼吸推定を行う方法を提案する.まず,Kinectで取得した距離画像の距離変動を波形データとして取得する.そして,波形データの切り出しを行い,切り出した波形データに対してウェーブレット変換を用い,周波数解析を行う.さらに,呼吸時の周波数解析の結果のみをオートエンコーダに学習させ,分類のための閾値を設定する.最後に,呼吸データのみ学習させたオートエンコーダと設定した閾値を用いて呼吸と呼吸以外の分類を行う.評価実験では,提案手法の汎化性能を示すために,人物ごとにデータを分割して交差検証を行う.さらに,距離画像全体に対して呼吸推定を行い,概ね胸部,腹部の動きを呼吸と認識していることを確認し,提案手法の有効性を示す.
[発表論文]
● “ウェーブレット変換とオートエンコーダを用いた呼吸判別”,電気・情報関係学会九州支部連合大会,05-2P-06,熊本,Sep. 2023.
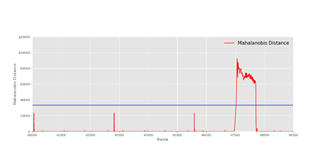
LSTMによる時系列呼吸データの自動異常検知 (予稿)
[概要]
近年,独居高齢者の増加に伴い,見守りシステムの需要が高まっている.本研究室では先行研究として,Kinectの距離画像を用いて取得した呼吸波形をCNNに学習させることで,呼吸波形とノイズの判別を行う方法が提案されている.しかし,先行研究では頻呼吸や徐呼吸などの異常な呼吸の判別は扱っていなかった.そこで本研究ではLSTMを用いて時系列呼吸データの自動異常検知を行う方法を提案する.まず,Kinectを用いて距離変動の波形データを取得する.そしてLSTMで正常呼吸を学習させ,入力した呼吸データの少し先の予測値を出力する.その予測値と実際の呼吸データの差をマハラノビス距離を用いて計算し,その差を異常値として算出する.また,異常値の閾値を設定しておき,正常呼吸と正常呼吸以外(異常呼吸)の分類を自動的に行う.最後に男女計8名の呼吸データを用いた評価実験を行い,提案手法により異常呼吸を自動検知できたことを示す.
USBカメラを用いたAR環境向け指先と掌の接触判定システムの開発 (予稿)
[概要]
近年,ARグラスやスマートグラスといった装着型のデバイスが増加しており,装着型デバイスにおける文字入力手法が研究されている.例えばユーザ自身の掌上にキーボードを表示し,LeapMotionを用いてフリック動作を認識して文字入力を行う方法などが提案されているが,深度センサ内蔵デバイスは高額になる傾向がある.そこで,本研究では安価なUSBカメラのみを用い,指先と掌でデバイスを操作する直感的な入力システムの開発を目的とする.まず,MediaPipe Handsを利用してUSBカメラの画像情報から手を認識し,指関節点の座標を取得する.次に,手首から親指付け根の関節点までの距離を手の大きさとし,奥行方向の推定を行う.そして,指先と掌の接触判定を用いて実際に文字を入力する機能を実装する.最後に,提案システムの評価実験を行い,USBカメラのみを用いて文字の入力を行った結果や実験で分かった今後の課題を示す.
Q学習を用いたロボットアームによる物体持ち上げの誤差補正 (予稿)

[概要]
近年,工場や工事現場でロボットアームの導入が進んでおり,物体の位置把握にはカメラがよく用いられている.しかし,物体側面の見え方や座標系を変換する際の誤差などにより,物体の重心座標を与えただけでは物体を持ち上げられない場合がある.そこで,本研究では強化学習の一つであるQ学習を用いて誤差の補正を行い,実際にロボットアームで物体を持ち上げる方法を提案する.まず,カメラキャリブレーションにより画像座標をロボット座標に変換し,色抽出により画像から物体の重心座標を取得する.次に,取得した重心座標にロボットアームを移動させた後,ランダムな補正値をアームに加え物体を持ち上げ動作を実行する.その後,持ち上げの成否やアームの動きによって得られた情報をもとにQ学習を用いて場所ごとに最適な補正値を学習する.そして,実際に評価実験を行い,最適な補正値を学習して物体の持ち上げに成功したことを確認し,提案手法の有効性を示す.
2021年度 (第7期生)
<姿勢推定>
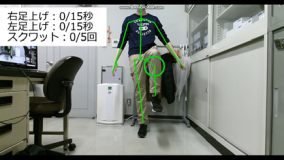
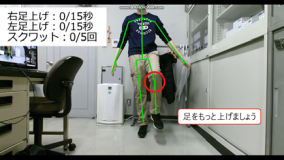
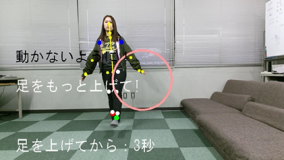
Azure Kinectとニューラルネットワークを用いた運動支援システムの改良 (予稿)
[概要]
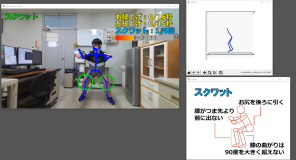
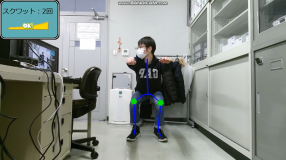
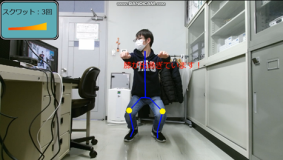
近年,世界規模で運動不足が問題視されている.さらにコロナ禍によって在宅勤務が広まり,運動機会が減少している.そのため,様々な運動支援システムが提案されている.先行研究として本研究室でもKinectの骨格情報とニューラルネットワークを用いたシステムが提案されているが,認識精度やフィードバックの分かりやすさに課題があった.そこで本研究では,より正確な深度情報を得られるAzure Kinectを用いてフィードバックが分かりやすく認識精度の高い運動支援システムに改良する.まず,より適切な運動になるように片脚上げの定義を変更する.また,訓練データに使用する骨格座標を増やし,骨盤からの相対座標を用いて立ち位置の影響を減らす.さらに,NNの構成を変更し,訓練データを増やすことで認識精度を向上させる.また,カメラ画像に加えて真横視点の3D表示など複数のウィンドウを表示し,スクワットの維持時間を可視化するゲージなどを実装することで,ユーザに分かりやすいフィードバックを行う.そして,実際に被験者に対して評価実験を行い,提案システムが運動支援に効果的であることを確認する.
Azure Kinectと3次元点群表示を用いた射形矯正システムの提案 (予稿)
[概要]
弓道における射形の矯正を効果的に行うためには指導者が必要と言われており,1人だけで射形の矯正を行うには自分の射形を多方向から確認する手段が必要となる.ビデオカメラなどの撮影機器を複数用いることで前述の要件は満たせるが,その実現には非常に多くの手間がかかってしまう.そこで本研究ではAzure Kinectを用いた射形矯正システムを提案する.学習者の各関節の3次元座標を取得し,射形の判定とフィードバックを行う.また,3次元点群表示を行うことで射形をあらゆる方向から確認できるようにする.さらに,録画・再生機能も実装し,繰り返し射形の確認が行えるようにする.そして,実際に弓道経験者に対して評価実験を行い,本システムの有用性を示す.
Leap Motionを用いた指文字翻訳システムの提案 (予稿)

[概要]
近年,聴覚障碍者の増加に伴い,手話や指文字の翻訳システムの開発が進められている.本研究では Leap Motionを用いて指文字を連続して翻訳するシステムを提案する.Leap Motionを用いて手や指の3次元座標値を取得し,手の中心や指先の距離を用いて手の形を推定する.そして,過去の座標値と比較することで動きのある指文字を認識可能にする.また,認識した文字を連続してウィンドウに出力することで,指文字を使った意思疎通が可能な翻訳システムを実装する.また,実際に被験者に対して評価実験を行い,9割を超える認識正解率が得られたことを示す.
相関を用いた呼吸推定用学習データの分類 (予稿)
[概要]
近年,独居高齢者の増加に伴い,見守りシステムの需要が高まっている.本研究室でも先行研究としてKinectの距離画像を用いて人物の胸の動きから呼吸を推定する方法が提案されている.しかし,機械学習を行うためには学習データが大量に必要であり,それを手動で分類するのは時間がかかる上,判断に個人差が生じてしまう.そこで,本研究では正規化相関を用いて自動的に分類する方法を提案する.Kinectの距離画像を複数の矩形に分割し,まず基準となる呼吸波形を手動で指定し,分類の手掛かりとする.そして,指定した波形とその他の波形の正規化相関を求め,その値に応じて自動的に分類を行う.また,評価実験により分類の正解率を検証し,提案手法を用いることで学習データ分類の作業時間を短縮させることができることを確認した.
見守りシステムのための1次元畳み込みを用いた呼吸推定方法の提案 (予稿)
[概要]
近年,独居高齢者の増加に伴い,見守りシステムの需要が高まっている.本研究室でも,先行研究としてKinectの距離画像を用いて人物の胸の動きから呼吸を推定する方法が提案されている.しかし,腕や体などの動きを誤検知してしまい,正確な認識を行えていなかった.そこで,本研究では呼吸の波形を1次元畳み込みを用いたCNNで学習し,呼吸と呼吸以外の波形を判別する手法を提案する.まず,Kinectを用いて1分間の距離変動の波形データを取得する.そして,短時間でリアルタイムに判定を行うためデータを切り出し,CNNを用いて呼吸と呼吸以外の判別器を作成する.また,データの切り出し方や縮小率を変更して認識率の比較検証を行い,実際に提案手法により呼吸による胸の動きを識別できたことを示す.
[発表論文]
● “見守りシステムのための1次元畳み込みを用いた呼吸推定”,電子情報通信学会総合大会,D-12-27,オンライン開催,Mar. 2022.
見守りシステムのためのCNNを用いた転倒人物姿勢推定の精度向上 (予稿)
[概要]
近年,高齢化により見守りシステムの需要が高まっており,それに伴って様々な見守りシステムが提案されている.先行研究として,転倒人物の姿勢推定を機械学習を用いて判別する方法が提案されており,学習済みの人物に対する認識精度は99%と高かったが,未学習の人物の認識精度は7割であった.そこで,本研究ではCNNのパラメータ検証,画像データの増加,機械学習の可視化を行い,識別器の認識精度を向上させる方法を提案する.まず,CNNの畳み込み層やフィルターサイズを変更して認識性能の検証を行った.次に学習データを増やし,GPUを用いた高速化処理を実装した.最後に学習したパラメータを可視化し,学習の傾向を把握した.そして,実際に転倒人物の画像の判別実験を行い,未学習の人物に対しても認識精度が向上したことを示す.
防犯システムのためのCNNを用いた不審動作認識手法の提案 (予稿)
[概要]
近年,防犯システムの開発が進められており,それに伴って様々な動作認識手法が提案されている.関連研究として,人物領域の画像データをCNNで学習させて姿勢を推定する研究やOpenPoseで推定した姿勢をVGG16などで学習させる研究も行われている.しかし,これらの研究では未学習の人物に対する認識精度の低さが問題点として挙げられている.そこで本研究ではKinectを用いて人物の骨格情報を取得し,人物領域にスケルトンを描画した画像をCNNに学習させて不審動作を判別する方法を提案する.人物領域にスケルトンを描画することで服装の変化や未学習の人物に対する汎用性を高め,スケルトンに色を付けることで身体の部位の意味的情報を追加する.3種類の画像をCNNでそれぞれ学習させ,その認識精度の比較検討を行う.そして,実際に不審動作認識の評価実験を行い,提案手法により未学習の人物に対する認識精度が向上したことを示す.
[発表論文]
● “骨格情報を描画した人物領域を用いたCNNによる不審動作認識の提案”,電気・情報関係学会九州支部連合大会,04-1P-03,オンライン開催,Sep. 2022.
● “骨格情報を描画した人物画像を用いた不審動作認識”,日本工業出版株式会社,画像ラボ,vol. 34, no. 10, pp. 45-50, Oct. 2023.
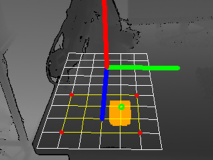
Kinectを用いたロボットアームのための吸着対象物体の3次元位置推定 (予稿)


[概要]
工場や工事現場などでロボットアームの導入が進んでおり,対象物体の認識にはカメラを用いるのが一般的である.本研究では吸盤を持つロボットアームとKinectを用い,対象物体の3次元位置を推定する方法を提案する.まず予めカメラキャリブレーションを行うことでKinectとロボットアームの位置関係を求める.次にKinectから取得した距離情報を用い,背景差分で物体領域を検出する.さらに検出した物体領域の2次元画像座標をワールド座標に変換し,その広がり具合を求めることで物体の上面中央の3次元位置を推定する.そして推定した物体位置にロボットアームを移動させ,物体の吸着を行う.また,実際に提案手法を用いて性能評価実験を行い,対象物体の3次元位置推定の精度を検証する.
ジェスチャを用いたロボットアーム制御システムの提案 (予稿)

[概要]
近年,コロナウイルスの影響により遠隔作業用のシステムの開発が進んでいる.しかし,それらの多くは接触型のシステムであり,感染予防の観点から非接触であることが望ましい.そこで本研究では,Kinectを用いてジェスチャでロボットアームを操作するシステムを提案する.Kinectで操作者の骨格情報から右手と左手の動きを認識し,その動きに対応する命令をロボットアームに送信する.操作の割り当ては右手でアームの移動,左手でヘッドの回転,フットペダルでグリッパの開閉とする.また,実装時に発生した2点の操作に関する問題については,前フレームと現フレームの手の座標を比較し,アームの移動方向を1方向に限定することで対策をした.そして,評価実験によりコントローラでの操作時と比較し,提案システムの有効性を確認した.
2020年度 (第6期生)
<運動支援(姿勢推定)>
Kinectを用いた投球動作の判定とフィードバック方法 (予稿)

[概要]
近年,野球では投球障害が多く発生しており,投球障害を防ぐためには自身の投球を客観的に見て自身の投球を改善する必要がある.そこで,本研究ではKinectの姿勢推定を用いて投球動作の判定を行うシステムを提案する.まず,投球障害について医学書や医師の解説記事を調査し,適切な判定条件を追加する.そして,身体の各関節の3次元座標を元に投球動作の自動判定を行い,投球者へ足の踏み出す位置が適切かどうか,身体と腕の動きが適切かどうか,投球時に肘が曲がっているかどうか,投球時の肘の高さが適切かどうかの4つの判定を行うシステムを開発する.また,判定結果を伝える際,視覚,聴覚を用いた学習しやすいフィードバックを実装する.最後に,提案システムを用いて評価実験を行い,その有効性を示す.
KinectとSVMを用いた運動支援システムの提案 (予稿)
[概要]
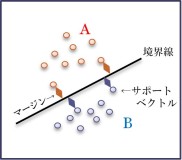
現在,世界では運動不足が蔓延している.さらにコロナ禍によって自宅待機やリモートワークが推奨され,身体活動量が低下している.その危機の一つとしてロコモティブシンドロームがある.これは運動器に障害が起こり,要介護状態となる危険性の高い状態のことをいう.本研究ではそのロコモティブシンドロームに対して効果的な運動の一つであるスクワットを正しい姿勢で行うための運動支援システムを提案する.本システムではKinectの骨格座標をサポートベクターマシン(SVM)に利用し,認識精度の向上を図る.また,ユーザーの正面にディスプレイを設置し,画面上に視覚的なフィードバックを行う.そして,5名の被験者に対して評価実験を行い,提案システムによる認識精度の向上を確認する.またアンケートの結果から,本システムが運動支援に効果的であることを示す.
Kinectとニューラルネットワークを用いた運動支援システムの提案 (予稿)
[概要]
近年,世界規模で運動不足が問題視されており,世界の成人の4人に1人,日本でも3人に1人が運動不足であるとされている.そのため,この問題の解決を目的とした運動支援システムが多数開発されている.先行研究として本研究室でもKinectの骨格情報を用いた運動支援システムが提案されているが,Kinectの骨格認識にズレが生じた際にユーザの動作を正しく判別することができない.そこで本研究ではニューラルネットワークを用いることでKinectの骨格認識のズレに対応した運動支援システムを提案する.まず,骨格認識がズレた状態の骨格情報を含む学習データを用意する.次に,それらをニューラルネットワークで学習して判別器を作成する.そして,その判別器を用いてユーザの姿勢に対して評価及びフィードバックを行う運動支援システムを作成する.また,実際にユーザにシステムを使用してもらい,姿勢認識が正しく行えていること,正しい姿勢で運動の支援が行えていることを確認する.
見守りシステムのためのCNNを用いた転倒方向の分類 (予稿)


[概要]
近年,見守りシステムの需要が高まっており,本研究室でも天井カメラと移動ロボットを連携させた見守りシステムが提案されている.呼吸推定を行うためには移動ロボットを人物の背中側ではなく正面側から近づける必要があるが,Kinectでは転倒人物の姿勢を正しく認識することができない.そこで本研究では,画像ベースの機械学習を用いて転倒方向を分類する方法を提案する.まず,背景の変化や位置の違いによって学習結果が変わることを避けるため,人物領域のみをトリミングする.そして,畳み込みニューラルネットワーク(CNN)を用いて画像を学習し,転倒方向を4つに分類する.また,評価実験として,人物領域を使用した2値画像,距離画像,人物領域と距離画像を組み合わせた画像でそれぞれの認識率を比較する.そして,未学習の人物に対しても転倒方向を分類できたことを示す.
見守りシステムのためのCNNを用いた転倒人物の姿勢推定 (予稿)

[概要]
近年,見守りシステムの需要が高まっており,それに伴って様々な見守りシステムが提案されている.先行研究として,本研究室では天井カメラを用いて人物の転倒を検知し,ロボットが近づいて呼吸推定を行う見守りシステムが提案されている.しかし,Kinectから取得できる骨格情報だけでは転倒した人物の姿勢を正しく推定することができない.そこで,本研究では機械学習の手法の一つである畳み込みニューラルネットワーク(CNN)を用いて画像判別を行い,転倒人物の姿勢を推定する方法を提案する.まず,Kinectで取得できる距離画像とカラー画像から背景差分を用いて人物領域を抽出した画像を取得する.次に,背景領域に学習を左右されないように人物領域を正方形で切り抜く.また,認識精度を高めるため,取得した画像に対してデータ拡張を行い,識別器を作成する.そして,実際に転倒人物の画像の判別実験を行い,十分な認識精度が得られたことを示す.
KinectとCNNを用いた呼吸推定方法の提案 (予稿)
[概要]
近年,独居高齢者の増加に伴い,見守りシステムの需要が高まっている.本研究室でも,先行研究として,Kinectの距離画像を用いて人物の胸の動きから呼吸を推定する方法が提案されている.しかし,腕や体などの動きを誤検知してしまい,正確な認識を行えていなかった.そこで,本研究ではKinectで取得した波形にCNNを用いて学習させ,呼吸による胸の動きとそれ以外の箇所の動きを判別させる判別器を作成する方法を提案する. まず,Kinectを用いて取得した距離変動の波形データを画像へと変換し,呼吸による動き,呼吸以外の大きな動き,呼吸以外の小さな動きに分類する.それらの画像をもとに,CNNを用いて呼吸と呼吸以外の判別器を作成する.そして,実際に呼吸推定の比較実験を行い,提案手法により呼吸による胸の動きを識別できたことを示す.
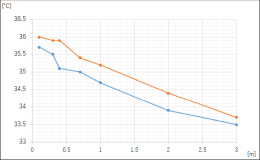
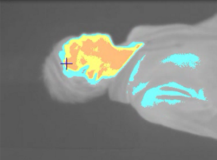
見守りロボットのためのサーモカメラを使った体温測定方法の検討 (予稿)

[概要]
近年,少子高齢化が進み,独居高齢者の数の増加により,孤独死や疾患発生の遅れを未然に防ぐ見守りシステムの需要が高まっている.先行研究として,本研究室では移動ロボットを用いて呼吸推定を行う見守りシステムが提案されている.また,呼吸以外の情報取得として,赤外線サーモカメラ用いた非接触な体温測定方法も提案されているが,正確な体温測定は行えていない.そこで本研究では見守りロボットのためのサーモカメラを使った体温測定方法について検討し,その問題点と解決方法について提案する.今回は赤外線サーモカメラの測定温度の補正,距離による測定温度の関係,気温による表面温度の変化の3つの問題点について調査する.そして実際の使用状況を想定した検証実験を行い,測定温度から体温を推定する方法を確認する.
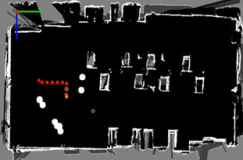
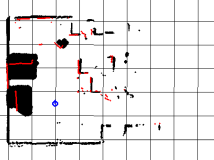
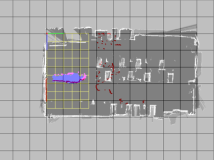
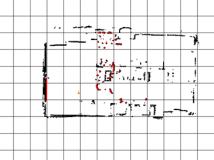
移動ロボットによる地図作成の自動化 (予稿)

[概要]
近年,人同士の接触を防ぐためにロボット等の無人の労働力の需要が高まっている.しかし,日常環境下で移動ロボットが動き回るためには,周辺環境の地図情報が必要になる.先行研究ではLRFを搭載した移動ロボットを使用して,ICP-SLAMを用いて確率的地図を作成している.しかしこの方法では,ロボットの移動は人が手動で操作する必要があった.そこで本研究では,移動ロボットによる地図作成の自動化を目的とし,ロボットの自律移動と自動地図作成の2つの機能を提案する.自動地図作成機能には簡易的な処理を組み,自律移動機能には巡回モードと指定モードの2つのモードを実装する.巡回モードには,障害物を回避しながら自動巡回するシステムを,指定モードには,地図作成の際に発生した取りこぼしを検出するシステムを構築する.そして,実際に研究室内の地図作成の実験を行い,障害物に衝突せずに巡回して自動で地図を作成できたことを示す.
Leap Motionを用いた円形の記号入力画面の提案 (予稿)

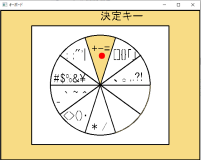
[概要]
近年,世界中に蔓延する新型ウイルスの登場により,非接触操作のニーズが高まっている.また,非接触デバイスを用いた文字入力方法も数多く提案されているが,従来研究の多くはひらがなを対象としており,記号を主体にしたものは少ない.そこで本研究では,非接触型デバイスであるLeap Motionを使用した記号入力方法について提案する.横並び入力画面と円形入力画面の2種類の文字入力方法を提案し,ユーザがストレスを感じない記号入力方法の特徴を明らかにする.そして比較実験により,横並び入力画面より円並び入力画面を用いた入力方法が適していることが確認できたことを示す.
Leap Motionを用いた複数家電の操作システムの提案 (予稿)

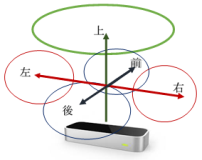
[概要]
近年,家庭内の家電機器の数や機能が増加しており,ユーザの負担軽減のための家電操作システムの研究が行われている.接触型デバイスへのジェスチャ認識や音声認識を用いたシステムなどが提案されているが,昨今の情勢から接触型であることや発声時の飛沫,認識精度が課題となる.そこで本研究ではLeap Motionと赤外線リモコンを用いて非接触型の操作システムを提案する.Leap Motionに両手をかざし,左手の指の本数と右手の人差し指の位置を認識する.検出した指の本数で操作する家電機器を指定し,検出した人差し指の位置で指定した機器に対する指示を行い,赤外線リモコンでその機器に信号を送信して実際に制御する.今回はTVとサーキュレータに対し,電源のON/OFFとTVの選局や音量,サーキュレータの風量や首振りを感覚的に操作できるように実装した.また,評価実験により提案システムが簡単かつ感覚的なリモコンシステムであることを確認した.
2019年度 (第5期生)
<見守りシステム(天井カメラ)>
見守りシステムのための天井カメラを用いた転倒人物の姿勢推定 (予稿)

[概要]
近年,見守りシステムの需要が高まっており,本研究室でも天井カメラと移動ロボットを連携させ,転倒した人物に近づいて呼吸推定を行う見守りロボットが提案されている.しかしKinectでは転倒人物の姿勢を正しく認識することができない.呼吸推定を行うには移動ロボットを人物の背中側ではなく正面側から近づける必要があるため,本研究では転倒人物の姿勢を推定し,ロボットの移動目標座標を求める方法を提案する.まず実空間での高さを用いて側臥位かどうかを判別し,次に脚部の情報を用いて側臥位時の前方判定を行う.そして転倒姿勢に合った移動目標座標を設定する.また,評価実験として実際に側臥位と仰臥位の判別と,側臥位時の前方判定を行った結果を示す.側臥位の判別はうまく行うことが出来たが,側臥位時の前方判定には失敗することもあったため,失敗の原因と改良方法についても述べる.
見守りシステムのための障害物の高さを考慮した室内環境認識 (予稿)
[概要]
現在,少子高齢化に伴う独居高齢者の増加から見守りシステムの需要が高まっており,本研究室でも移動ロボットと天井カメラを連携させた見守りシステムの開発が進められている.転倒した人物を天井カメラで検知し,その人物も障害物としてロボットの自己位置推定や経路計画を行う方法が提案されているが,先行研究では障害物の高さは考慮されていなかった.そこで本研究では,人物や障害物の高さを考慮して室内環境を認識し,より正確に自己位置推定や経路計画を行う方法を提案する.まず,事前にカメラキャリブレーションを行っておき,取得した距離画像の各画素を3次元のワールド座標へと変換することで,実世界における高さZ_wを求める.その高さ情報を用いて障害物領域を抽出し,それらを地図画像上にマッピングする.そして,障害物の高さを考慮した地図画像を用いて経路計画や自己位置推定を行う.また,研究室内で実験を行い,実際に障害物領域を地図画像上にマッピングし,その障害物を回避する移動経路や自己位置を推定できることを示す.
反射マーカーを用いた天井カメラからのロボット位置推定 (予稿)


[概要]
本研究室では天井カメラと移動ロボットを連携させた見守りシステムの開発が進められている.その中でロボットの位置推定は重要な課題の1つとされており,ロボットにレーザー距離センサを搭載して自己位置推定を行う方法が数多く研究されている.しかし,本研究室の見守りシステムでは移動ロボットと天井カメラを連携させているため,天井カメラでロボットを観測することができる.そこで,本研究ではロボットにマーカーを取り付け,天井カメラの映像からロボットの位置推定を行う方法を提案する.まず,カメラとロボットの距離や位置関係を考慮して球体の反射マーカーを作成した.そして,天井カメラKinect v2の赤外線カメラでロボットに設置した反射マーカーを観測し,赤外線画像に2値化・ラベル付け処理を行ってマーカー領域を抽出する.その後,2次元画像座標から3次元ワールド座標へ変換してロボットの位置・向き推定を行う.さらに,推定した位置と向きの精度について評価実験を行い,ロボット制御を行うのに十分な精度が得られたことを示す.
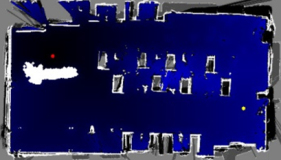
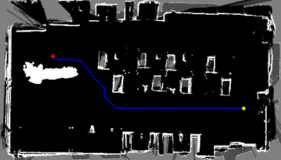
見守りロボットにおける障害物回避を考慮した経路計画 (予稿)


[概要]
現在,独居高齢者の増加に伴い,様々な見守りシステムが提案されている.本研究室でも天井カメラを用いて人物の転倒を検知し,ロボットが人に近づいて呼吸推定を行う方法が提案されている.ロボットの移動のための経路計画も実装されているが,移動中に未知の障害物を検知した場合の回避行動は実装されていない.そこで本研究では,地図上に無い未知の障害物を検知した場合,障害物を地図に追加し,障害物を迂回する経路を再探索する方法を提案する.まず,障害物にぶつからないようにするため,障害物の近くにコストを設定する.次に,そのコストを考慮しながら,A*アルゴリズムにより移動経路を求める.そして,実際に実験で地図上に無い未知の障害物をレーザ距離センサで検知した場合には地図上に円形で障害物として追加し,経路の再探索をおこなう.これを繰り返すことにより障害物を迂回し目標位置までロボットを移動させることができたことを示す.
見守りロボットのための障害物を考慮した自己位置推定 (予稿)

[概要]
現在,高齢化社会が加速し,独居高齢者の見守りが大きな課題の一つとなっている.そこで本研究室では,天井カメラと移動ロボットを組み合わせた見守りシステムの開発か進められている.先行研究として,転倒人物を考慮した自己位置推定や経路計画が提案されている.しかし,転倒人物などの障害物領域が広くなると除去される観測データが多くなるために自己位置推定が難しくなったり,移動中に自己位置のずれが生じたりしてしまうという問題がある.これらの問題を解決するため,地図にない障害物を観測データから除去するのではなく,本研究では障害物の情報をモデルデータに追加して自己位置推定を行う方法を提案する.また,実際に自己位置推定を移動ロボットに実装し,中間目標に到達するごとに向きと位置の修正を行う.そして,障害物が多い環境でロボットを経路通りに移動させる実験を行い,提案手法の有効性が確認できたことを示す.
[発表論文]
● "Monitoring System using Ceiling Camera and Mobile Robot", Journal of Robotics and Mechatronics, vol. 35, no. 1, pp. 206-211, Feb. 2023.
局所地図の合成による広域地図の作成 (予稿)



[概要]
現在,介護用ロボットや警護ロボットなどの自律移動ロボットの導入が増加しており,このような自律移動ロボットが動作するためには周辺環境の正確な地図が必要である.移動ロボットに搭載したレーザ距離センサを用いて地図を作成する研究も数多く行われているが,廊下などの広域な範囲の地図を作成する場合,誤差の蓄積による地図の傾きや障害物の消失といった問題が発生する.そこで本研究では対象範囲全体の地図を1度で作成するのではなく対象範囲を分割して局所地図を作成し,その後,確率的地図の障害物存在確率に応じて合成することで対象範囲全体の地図を作成する手法を提案する.そして,実際に福岡工業大学C棟6階廊下で地図作成実験を行い,従来手法との比較により提案手法の有効性を示す.
Kinectを用いた運動支援システムの提案 (予稿)

[概要]
現在,世界では運動不足が蔓延している.その危機の中にロコモティブシンドロームというものがあり,それを防ぐための運動としてロコモーショントレーニングがある.この運動は主にスクワットと片足上げで成り立っており,本研究ではこれらを正しい姿勢で行うための運動支援システムを提案する.本システムではKinectの骨格抽出機能を用いてユーザの姿勢推定を行う.またユーザの正面にディスプレイを設置し,ユーザは画面を見ながら運動を行う.運動が実施されるたびに〇を画面に表示し,正しく動けていない場合には警告を表示する.また警告が表示された回数から割合を算出し,3段階で最終評価を行う.そして,実際に7名の被験者に提案システムを体験してもらい,多くの人が正しい姿勢で運動が行えていないことを確認した.またアンケート回答の結果より,本システムが効果的だという回答が得られた.これらより,正しい姿勢で運動を行う支援システムとして,本システムが効果的であることを確認した.
LRFとプロジェクタを用いた投影型リモコンシステムの提案 (予稿)
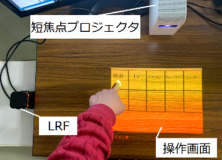
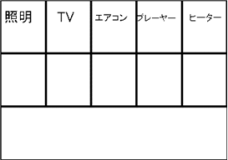
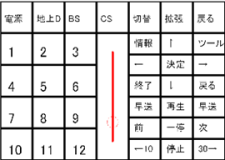
[概要]
近年,家庭に設置する家電機器の増加に伴い,ユーザへの負担が少ない家電操作システムの研究が行われている.ジェスチャ認識や画像処理を用いたシステムなどが提案されているが,その使い勝手や多機能化のためには手振りやタッチ操作などの認識率が課題となる.そこで本研究ではLRF(Laser Range Finder)と短焦点プロジェクタを用いた投影型リモコンシステムを提案する.プロジェクタで操作画面を机の上に投影し,ユーザは投影された操作画面を直接指で差し,LRFを用いてその指の位置を検出する.この時,観測値には誤差が含まれるため,ノイズ除去を行うことで指の位置を安定,正確に推定する.また,プロジェクタを用いて色々な操作画面を投影し,ボタンの数やサイズを変更するだけでなく,スクロールバーなど利便性の高い操作を可能にする.さらに,性能評価実験によりノイズ除去の有効性を示し,提案システムで認識可能なボタンサイズを確認する.
LRFを用いた大型投影画面のタッチパネル化 (予稿)
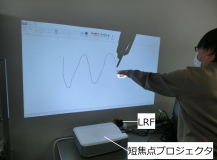
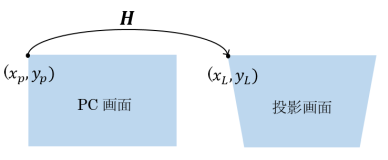
[概要]
近年,技術の発達によりディスプレイの大型化が進んでおり,将来的には壁一面が大画面となるような環境も考えられ,大画面環境に適した操作性の高い入力インタフェースが必要になると考えられる.そこで,本研究では距離センサと短焦点プロジェクタを用い,大型の投影画面をタッチパネル化する手法を提案する.プロジェクタの投影画面をタッチパネル化する際,投影画面が歪んでいると正確に位置合わせが行えず,指をさした位置と反応した位置がずれてしまう.そこで射影変換を用いることで画面の歪みに対応した位置合わせを行う.また,LRFの観測ノイズを除去し,指の位置を安定に推定する.そして,実際に従来手法と本論文の提案手法を比較し,プロジェクタの投影画面の歪みに対応していることを確認する.
2018年度 (第4期生)
<見守りシステム(天井カメラ)>
距離値を用いた背景差分による人物領域抽出 (予稿)



[概要]
少子高齢化が進むにつれて独居高齢者の割合が増加し,それに伴って様々な見守りシステムが提案されている.先行研究として,天井カメラを用いて人物の転倒を検知し,ロボットが近づいて状態推定を行う見守りシステムも提案されているが,Kinectから取得できる骨格情報だけでは転倒した人物の姿勢を正しく認識することは難しく,また,ロボットが転倒した人物に近づく際の経路計画や自己位置推定にも人物の詳細な位置情報が必要になる.そこで,本研究では天井に設置したKinectから距離画像を取得し,背景差分により人物領域を安定に抽出する方法を提案する.特に,Kinectから得られる距離値にはばらつきや抜けなどが含まれ,ノイズが多く発生するので,それらの解決方法を提案する.また,評価実験を行い,提案手法によって誤検出を大きく改善できることを示す.
見守りシステムのための色情報を用いた転倒方向判別 (予稿)


[概要]
少子高齢化が進むにつれて,独居高齢者の割合が増えており,高齢者を補助する見守りシステムの需要が高まっている.先行研究として,天井カメラで人物の転倒を検知し,移動ロボットが転倒した人物に近づいて状態確認を行う見守りシステムが提案されている.しかし, Kinect SDKでは転倒した人物の姿勢情報を正確に認識することは難しい.そこで本研究では,人物の服の色情報を利用し,人物がどの方向に転倒しているかを判別する方法を提案する.まず,背景差分を行いて人物領域を取得し,人物が立っている状態で服の色情報を学習する.そして,人物が転倒した際,その領域を分割し,上半身と下半身の色情報をもとに転倒方向を判別する.また,実際に人物が体を真っ直ぐにして倒れた場合と体を曲げた場合で実験を行い,大まかな転倒方向を判別できたことを示す.
LRFを用いたICP-SLAMによる地図作成の改良 (予稿)

[概要]
現在,様々な分野や環境で自律移動ロボットが活用されているが,その動作には正確な地図が必要不可欠である.本研究ではLRF(Laser rangefinder)を用いたICP-SLAMという手法に改良を加え,障害物の多いループ形状の室内環境の地図を作成する際に生じる問題点の解決手法を提案する.本手法ではLRFの計測結果に対し,誤計測の可能性が高くなる遠方の点,両隣の点との距離がある点,前のフレームとの観測距離の差が大きい点,およびマッチングが正確でない計測結果を地図の更新や自己位置推定から除外する.これにより悪影響となるノイズや細かい点を排除することができ,その結果歪みのない正確な地図を作成することが可能となる.また,実際に検証実験を行い,提案手法を用いることで正確な地図が作成できることを示す.
見守りロボットのための転倒人物領域を考慮した自己位置推定方法の検討 (予稿)
[概要]
本研究室では天井カメラと移動ロボットを連携させた見守りシステムの開発が進められている.ロボットを転倒した人物の近くへ移動させるためには自己位置推定や経路計画が必要であるが,事前に学習した壁などの地図情報に加え,転倒した人物が新たな障害物となるため,自己位置推定に誤差が生じてしまう.そこで,本研究では天井カメラとレーザ距離センサを用いて転倒した人物の領域を求め,その情報を用いてロボットが自己位置を正しく推定するための方法を提案する.天井カメラに搭載されている距離カメラ用い,背景差分によって得られた人物領域を座標変換し,地図画像上にマッピングする.そして,人物領域内の観測点をICPマッチングから除くことで自己位置を正しく推定する.また,実際に人物が倒れている状況に対して評価実験を行い,提案手法により位置推定の誤差を抑えられることを示す.
[発表論文]
● “見守りロボットのための転倒人物領域を考慮した自己位置推定”,電子情報通信学会総合大会,D-12-37,東京,Mar. 2019.
見守りシステムのための移動ロボットの経路計画 (予稿)
[概要]
現在,独居高齢者の増加に伴い,様々な見守りシステムが提案されている.本研究室でも天井カメラを用いて人物の転倒を検知し,ロボットが人に近づいて呼吸推定を行う方法が提案されている.しかし,ロボットの移動は前進のみであり,障害物を迂回しながら人物に近づくような経路計画は未実装である.そこで本研究では,天井カメラで転倒した人物の領域を取得し,その情報を考慮して経路計画を行う方法を提案する.まず,障害物にぶつからないようにするため,障害物の近くにコストを設定する.次に,そのコストを考慮しながら,ゴールから離れるほど大きくなるような経路コストを設定し,その経路コストを用いてスタートからゴールまでのロボットの移動経路を求める.そして,経路上を一定間隔にまびいた点を中間目標点として順にロボットに与え,その経路に沿ってスムーズにロボットを移動させる方法を実装する.さらに,実験により実際に転倒した人物の近くまでロボットを移動させることができたことを示す.
LRFの反射強度を用いた再起反射物体の認識 (予稿)
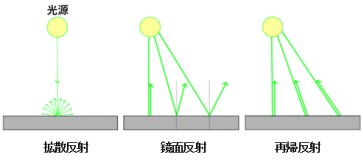
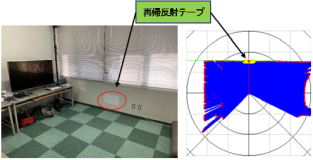
[概要]
移動ロボットにおいて,自己位置推定は重要な課題の一つであり,数多くの研究が行われている.その際,測定精度の高いレーザ距離センサがよく使用されているが,レーザ距離センサは距離だけでなく,反射強度を測ることもできる.反射強度を用いて物体の材質を認識する研究も提案されており,本研究では反射強度を手掛かりにして自己位置推定の精度を向上させる方法について検討する.部屋の特定の場所に再起反射テープを貼り,それを目印にすることで自己位置推定の精度を向上させることができると考え,反射強度をもとに反射の種類を判別する方法を提案する.そして,実際に再帰反射物体と鏡面反射物体の認識実験を行い,正しく判別できることを示す.
2017年度 (第3期生)
<見守りシステム>
Kinectを用いた呼吸判定と呼吸数の推測 (予稿)
[概要]
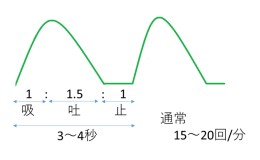
近年,独居高齢者の増加に伴い,見守りシステムの需要が高まっている.先行研究として,Kinectの距離画像を用いて人物の胸の動きから呼吸を推定する方法が提案されている.画面を格子状に分割し,それぞれの矩形領域における距離の変動をもとに胸部領域を抽出する.しかし,単純なしきい値処理で動きのある領域を抽出しているだけであるため,誤検知が多く,正確な判定を行えていなかった.そこで,本研究では距離変動の波形から極大と極小を抽出し,一般的な呼吸の特徴を考慮して呼吸判定を行う方法を提案する.また,短時間の呼吸データから1分間の呼吸数を推測する方法を提案する.そして,検証実験により転倒状態においても正しく呼吸判定が行えること,1分間の呼吸数を安定に推測できることを示す.
見守りシステムによるロボットの遠隔操作と通知 (予稿)
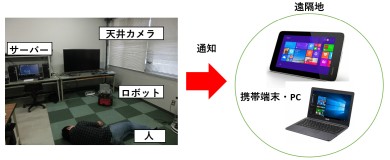

[概要]
近年,一人暮らしの高齢者の増加に伴って孤独死や疾患の発見の遅れが問題になっており,多種多様な見守りシステムの開発が行われている.先行研究として移動ロボットを用いて呼吸推定を行う見守りシステムも提案されているが,ロボットの視点でしか周りの様子を知るすべがなく,計測結果を通知する方法も実装されていない.そこで本研究では,各機器を連携させ,天井カメラを用いて人物の転倒などを検知し,移動ロボットにより人物の状態確認を行った後,その情報を遠隔地のPCやタブレットに通知する見守りシステムを提案する.そして,実際にTCP/IP通信を用いて情報をやり取りし,画像の送信やロボットの遠隔操作が可能なシステムを構築する.
天井カメラを用いた転倒検知による見守りロボット制御 (予稿)
[概要]
少子高齢化社会が進むにつれ,独居または要介護高齢者の割合が増加することが懸念されている.それに伴って様々な見守りシステムが提案されており,先行研究として移動ロボットを用いて呼吸推定を行う方法も提案されている.しかし,ロボットから観測できる情報のみを用いて転倒した人物を見つけ,呼吸推定に適した位置へ移動させることは難しい.そこで,本研究では天井カメラと移動ロボットを連携させて人物の状態確認を行う見守りシステムを提案する.天井カメラを用いて人物の転倒を検知し,姿勢情報をもとにロボットの移動目標座標を計算することで,呼吸推定に適した位置へロボットを移動させる.そして,実際に天井カメラとロボットが通信し,計算した移動目標座標へロボットを移動させることができることを示す.
LRFを用いた地図作成方法の改良 (予稿)
[概要]
現在,様々な分野で移動ロボットが普及しており,地図作成は移動ロボットの重要な課題の一つと考えられる.本研究では,比較的測距精度の高いLRF(レーザ距離センサ)を用い,障害物が多い室内環境で地図を作成した際に生じる問題点の解決方法を提案する.一度観測した壁が消失する問題と,物体と壁との間に本来ないはずの壁が発生する問題の2つについて検討し,それらを解決するための改良方法を提案する.そして,検証実験により,提案手法を用いることで正しい地図が作成できることを示す.
見守りロボットの位置調整のための回転量推定とカメラ方向制御 (予稿)

[概要]
近年,一人暮らしや要介護の高齢者の増加に伴い,様々な見守りシステムの開発が進められている.先行研究として移動ロボットを人物に近づかせ,Kinectで呼吸推定を行う方法や,そのロボットの向き調整の方法などが提案されている.しかし,ロボットの移動は前進と回転のみであり,最適な位置や角度から観測するための位置調整の手段としては不十分である.そこで,本研究では位置調整を実現する際の問題点について検討し,その解決方法を提案する.まず,サーボモータを使ってカメラの方向を制御する.また,ジャイロセンサを使って回転量を推定し,ロボットを指定した角度だけ回転させる.そして,評価実験によりロボットとカメラ回転の回転角度の誤差は1.0度以内であり,位置調整に十分な精度で制御できていることを示す.
見守りロボットのための赤外線サーモカメラを用いた体温測定方法の検討 (予稿)

[概要]
近年,少子高齢化が進み,独居高齢者の数が増加している.それに伴い,孤独死や疾患発生の遅れを未然に防ぐ見守りシステムの需要が高まっている.先行研究として,移動ロボットを用いて呼吸推定を行う方法が提案されているが,呼吸以外の情報取得も必要と考え,本研究では体温を計測する方法について検討する.赤外線サーモカメラの温度画像を用い,見守りロボットのための非接触な体温測定方法を提案する.非接触体温計を用いた予備実験により赤外線サーモカメラの特性を調査し,温度画像から体温を推定する方法を提案する.そして実際の使用状況を想定した検証実験を行い,体温測定が可能なことを示す.
Leap Motionを用いた文字入力方法の提案と比較検討 (予稿)
[概要]
近年,人の自然な動きを認識してコンピュータの操作を行うNUIのシステム開発が多く行われている.Leap Motionもその機器の一つであり,両手の指の動きを使った文字入力方法なども提案されている.しかし,このような方法ではユーザがストレスを感じてしまうことが課題であった.そこで,本研究ではユーザが使いやすく,ストレスを感じない文字入力方法について検討する.3種類の文字入力方法を提案し,ユーザがストレスを感じない文字入力方法の特徴を明らかにする.そして,比較実験により,今回の文字入力にはポインティングのみを用いた入力方法が最も適していることが確認できたことを示す.
動画編集のためのジェスチャのキーフレーム自動抽出 (予稿)
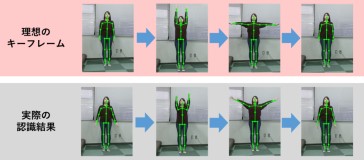
[概要]
近年,スポーツやライブなど様々な分野で映像とCGを合成する機会が増えている.CG合成を自動化するためには,ジェスチャ認識と適切なタイミングのキーフレームを抽出することが必要である.そこで本研究では,ジェスチャ中の適切なキーフレームを自動抽出し,それを元に自然な動きで速度調節を行う方法を提案する.状態遷移を用いてジェスチャの成否判定を行う際,実際に抽出されるタイミングは理想のキーフレームとずれてしまうため,関節の移動速度を用いてそのズレを修正する.また,調整したタイミングを用いて動画の速度調整を行う.そして,簡単なジェスチャと複雑なジェスチャに対して検証実験を行い,実際に理想に近いキーフレームを取得できることを示す.
平面推定による3Dモデルの不要点削除 (予稿)
[概要]
近年,3Dモデルの需要が高まっており,一般の人でも手軽に形状モデルを作成できるソフトも登場している.Kinect Fusionもその一つであるが,対象の物体以外にも背景など不要な場所も含まれるため,それらを手動で削除しなければならないという問題がある.そこで本研究では,不要な点を自動的に削除するための方法を提案する.まず最初に,背景差分による削除を試みたが,対応付けが難しいことを確認した.そのため,平面推定を用いた削除方法を提案する.Kinect Fusionで作成されたモデルにはノイズも多く含まれているため,RANSACアルゴリズムを用いて平面を推定する.そして,提案手法によって実際に対象物体の周辺の床面を削除できることを示す.
2016年度 (第2期生)
<見守りシステム>
Kinectを用いた転倒状態にある人物の胸部領域の検出と呼吸推定 (予稿)
[概要]
近年,少子高齢化が進み,一人暮らしの高齢者が増加している.それに伴って孤独死や疾患の発見の遅れが問題になっており,それらを未然に防ぐための見守りシステムの需要が高まっている.先行研究では,Kinectを移動ロボットに載せ,人物の転倒を検知したときにデータ取得可能範囲までロボットを人物に接近させ,Kinectの距離画像を用いて呼吸を推定する手法が提案されている.しかしKinectでは転倒している人物の姿勢を認識できないため,胸部領域の位置を予測して呼吸推定を行っていた.そこで,本研究ではKinectの画面中から倒れた人物の胸部領域を検出し,呼吸を推定する手法を提案する.画像を複数の領域に分割し,各領域の距離変動から呼吸による動きかどうかを判定することで,画像中の胸部領域を検出する.そして,実際に転倒状態にある人物の呼吸が推定できることを示す.
呼吸推定を行う見守りロボットの改良 (予稿)



[概要]
近年,少子高齢化が進み,一人暮らしや要介護の高齢者が増加傾向にある.それに伴って孤独死や疾患の発見の遅れが問題になっており,多種多様な見守りシステムが普及している.先行研究として,移動ロボットが人物の転倒を検知して近づき,Kinectの距離画像を用いて呼吸を推定する方法が提案されているが,このシステムでは人物がロボットの正面にいることを前提としていた.そこで,本研究ではこの見守りロボットを改良し,KinectとLRFを併用して安全に人物に近づき,呼吸推定に適した位置へ自動で移動する方法を提案する.そして,実際にシステムを構築し,一連の動作を自動的に実行できることを示す.
[発表論文]
● "Development of Respiration Measuring Robot", Journal of Robotics and Mechatronics, vol. 31, no. 5, pp. 715-718, Oct. 2019.
KinectとLRFを用いた三次元地図の作成 (予稿)
[概要]
近年,3Dスキャナなどを用いて実物体から三次元モデルを作成するツールが多数開発されている.それらを用いることで小さい三次元モデルは容易に作成できるが,部屋全体などの大きい範囲を対象として三次元モデルを作成する場合には,3Dスキャナを大きく動かす必要があるためデータのずれが発生しやすいという問題がある.そこで,本稿ではKinect(RGB-Dカメラ)とLRF(レーザ距離センサ)を用いて広範囲の三次元地図を作成する手法を提案する.Kinectを用いて複数の三次元モデルを作成し,LRFを用いて推定した自己位置情報をもとにそれらを合成していくことで広範囲の三次元モデルを作成する.そして,実際に提案手法を用いて研究室内の三次元地図を作成し,その有効性を示す.
[発表論文]
● “見守りシステムのための三次元地図作成方法の検討”,福岡工業大学情報科学研究所所報,vol. 28, pp. 33-36, Oct. 2017.
既存形状とKinect Fusionを用いた3Dモデル生成手法の改良 (予稿)

[概要]
近年,3Dモデルの需要が高まり,手軽に形状モデルを作成できるツールも登場している.しかし,これらの方法でモデルを作成した場合でも細かなノイズが出てしまうため,それを除去する手間が必要になる.そこで,先行研究では既存の3DモデルとKinect Fusionを組み合わせ,任意のテクスチャを持つ3Dモデルを作成する方法を提案している.しかし,使用するモデルによっては,テクスチャをうまく表現できないという問題があった.そこで,本研究ではその原因である点情報の欠けを自動で補間し,この問題を解決する方法を提案する.さらに,提案手法を用いて実際にモデル生成を行い,既存手法との比較により提案手法の有効性を示す.
写真のみを用いた3Dモデルの合成による全周モデルの作成 (予稿)

[概要]
近年,3Dモデルの需要は高まっており,手軽にモデルを作成することが可能となってきている.中でも,ReMakeというソフトでは写真を撮影するだけで3Dモデルの作成ができ,写真を用いるためテクスチャの再現度も高い.しかし,対象物体の周囲の背景情報を用いて位置合わせを行っているため,物体を動かすことはできず,床との接地面は写真に写らない.ゆえに,その部分はモデル作成できず穴があいてしまう.本稿では対象物体の置き方を変えて複数の3Dモデルをそれぞれ復元し,ICPアルゴリズムを用いて位置合わせを行った後,それらを合成することで穴のない全周モデルを作成する方法を提案する.
Kinectの姿勢推定を用いた投球動作の判定 (予稿)



[概要]
近年,野球では投球障害が多く発生しており,投球障害を防ぐためには自身の投球を客観的に見て自身の投球を改善する必要がある.そこで,本研究ではKinectの姿勢推定を用いて投球動作の判定を行うシステムを提案する.姿勢推定により得られた身体の各関節の3次元座標を元に投球動作の自動判定を行い,投球者へ足の踏み出す位置が適切かどうか,身体と腕の動きが適切かどうか,投球時に肘が曲がっているかどうかの3つのタイミングで怪我しやすい動作を検知するシステムを開発する.また,提案システムを用いて実際に投球動作の認識の性能評価実験を行い,その有効性を示す.
複数Kinectを用いた倒立矯正システム (予稿)
[概要]
様々なスポーツの分野で体幹を鍛えることがパフォーマンスの向上に繋がるとされており,体幹を鍛える手法の一つとして倒立が挙げられている.しかし,綺麗な倒立でなければ効率よく体幹を鍛えることができず,実際には自分で倒立姿勢を認識することは難しい.そこで,本研究ではKinectを用いて倒立姿勢を認識し,矯正を促すシステムを開発する.複数台のKinectをユーザの周囲に設置し,肩と肘の三次元座標を用いて上腕の傾きから倒立の状態を判定する.また,距離情報を利用して人物領域を抽出し,足の形状から膝の曲がり具合を認識する.そして,各Kinectの認識結果をサーバで統合し,膝が曲がっている状態が続いた場合に警告音を鳴らしてユーザに通知するシステムを提案する.
[発表論文]
● “複数Kinectを用いた倒立矯正システムの提案”,電子情報通信学会総合大会,D-12-12,名古屋,Mar. 2017.
2015年度 (第1期生)
<見守り・監視>
見守りシステムのための人物呼吸推定と移動ロボットの製作 (予稿)


[概要]
近年,少子高齢化が進み,独居高齢者が増加している.それに伴って孤独死や疾患の発見の遅れが問題になっており,多種多様な見守りサービスの開発が行われている.既存手法として,Kinectの距離画像から呼吸を推定する方法が提案されているが,Kinectから人までの距離が1200mm未満でなければ正確な呼吸を算出する事ができない.また,寝ている状態などの姿勢では呼吸の推定ができないという問題がある.そこで,本研究ではKinectを搭載した移動ロボットを人物に近づけさせることでこの問題を解決する.先行研究の見守りシステムを参考に,掃除ロボットRoombaを使用した見守りロボットを製作する.
[発表論文]
● "Development of a Breathing Detection Robot for a Monitoring System", Proc. Joint 8th International Conference on Soft Computing and Intelligent Systems and 17th International Symposium on Advanced Intelligent Systems (SCIS&ISIS2016), pp. 790-795, Sapporo, Japan, Aug. 2016.
● “見守りシステムのための移動ロボットによる呼吸推定方法の検討”,日本機械学会ロボティクス・メカトロニクス講演会2016(ROBOMECH2016),2A1-09b6,横浜,Jun. 2016.
暗所監視カメラのための赤外線反射特性を用いた人物識別 (予稿)

[概要]
近年,防犯カメラが普及し,照明変動を考慮した人物識別の手法なども数多く提案されている.しかし,一般的なRGBカメラでは,暗所や悪天候時には人物を正確に観測する事が難しい.そこで,本研究では暗所でも観測が可能な赤外線カメラを使用した監視システムを開発する.Kinectの赤外線カメラを用いて赤外線画像と人物までの距離を取得し,赤外線反射特性を用いて人物識別を行う方法を提案する.さらに,複数の関節位置の反射係数を用い,複数の衣服の組み合わせを利用することでより安定した人物識別を実現する.そして,性能評価実験により,学習に用いたデータと異なる距離においても人物の識別が可能なことを示す.
[発表論文]
● “暗所監視カメラのための赤外線反射係数を用いた人物識別方法の検討”,第19回画像の認識・理解シンポジウム(MIRU2016),PS3-15,浜松,Aug. 2016.
VDT作業環境及び作業姿勢の検知・警告システムの提案 (予稿)


[概要]
近年,PCを長時間に渡って利用する作業環境が増加しておりVDT症候群になる人が多くなってきている.そこで,本稿では労働衛生状態の改善を目的とし,ユーザーの姿勢推定だけでなく,実際にVDT作業中かどうかを判断したり,作業環境の状態管理も行うシステムを開発する.予めカメラやディスプレイ,机などの位置関係を求めておき,Kinectで取得した頭部位置とディスプレイとの距離や,机からの手首の高さ,両肘の角度などを計測する.また,作業環境の二酸化炭素濃度を計測する.これらの情報を用いてユーザーがVDT作業中かどうかを判断し,状態に応じて警告を行うシステムを提案する.
[発表論文]
● “VDT作業環境及び作業姿勢の検知と警告”,電子情報通信学会総合大会,D-12-51,福岡,Mar. 2016.
Leap Motionを用いたジェスチャ認識によるプレゼンテーション操作 (予稿)



[概要]
ヒトの身体や手足の姿勢やジェスチャを認識するモーションセンサ型の装置が注目を集めており,NUI機器として様々な分野での用途が期待できる.本研究では,マウスやレーザーポインタなどの機器を何も手に持たずにプレゼンテーションを行うシステムを開発する.Leap Motionを用いて手の形状や動作を認識することにより,スワイプ動作によるスライド切り替え,指差しによるポインティング,一本指での線の描画の3つのプレゼン機能を実装し,ジェスチャを用いた直感的なインタフェースを提案する.そして,提案システムを実装し,実際にプレゼン操作の評価実験を行った結果を示す.
[発表論文]
● “ジェスチャ認識によるプレゼンテーション操作の実装”,電子情報通信学会総合大会,D-12-47,福岡,Mar. 2016.
SVMとk-NNを組み合わせたジェスチャ認識手法 (予稿)
[概要]
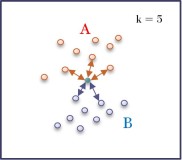
カメラ等を用いてジェスチャを認識する技術は,ジェスチャゲームやインタフェースなど幅広い分野に応用されている.また,機械学習手法としてはSVMが有名であり,ジェスチャ認識以外の分野でも利用されている.しかし,特にジェスチャ認識においては,あらゆるジェスチャを想定し,予め認識対象外のクラスも含めて十分に学習させることは難しい.そこで,本研究ではSVMとk-NNを組み合わせた認識手法を提案する.それぞれの判定結果をもとに5つの場合に分類し,SVMとk-NNを併用することで未学習のジェスチャ,認識対象外のクラスにも対応出来る認識手法を提案する.そして,実際に認識実験を行い,未登録のジェスチャに対しての認識性能が向上したことを示す.
[発表論文]
● “SVMとk-NNを組み合わせたジェスチャ認識手法の提案”,電子情報通信学会総合大会,D-12-49,福岡,Mar. 2016.
Kinect Fusionを用いた高精度3Dモデル作成 (予稿)
[概要]
近年,3Dモデルの需要が高まり,手軽に形状モデルを作成できるツールも登場しているが,これらの手法でモデル作成した場合でも細かなノイズを除去する手間が必要になる.そこで,本研究では既存の3D形状モデルとKinect Fusionで作成した色モデルを使い,精度の高い新しいモデルを作成する手法を提案する.まず,主成分分析とICPアルゴリズムにより,2つのモデルの高精度な位置合わせを行う.そして,最近傍探索を用いて対応点を求めることでテクスチャの貼り付けを行う.さらに,実際に提案手法を用いてモデル作成を行い,提案手法の有効性を示す.
[発表論文]
● “Kinect Fusionを用いた高精度3Dモデル作成方法の検討”,電子情報通信学会総合大会,D-12-71,福岡,Mar. 2016.
拡張現実のためのKinectを用いた平面検出方法の提案 (予稿)
[概要]
近年,カラー画像だけでなく距離画像も用いて処理を行うデバイスが増え,物体認識や拡張現実等の実空間とリンクした画像処理が急速に発達している.本研究では事前学習なしで空間認識を行うため,Kinectから取得した画像を領域分割して平面判定を行い,壁や物体などを検出する方法を提案する.領域分割には,Hough変換で直線を検出して四角形を生成する方法と,SLICを用いて色の類似度に基づいてクラスタリングを行う方法の二種類を用いる.画像を小領域に分割し,各領域の平面パラメータを求めた後,各点が同一平面上にあるかを判定して平面検出を行う.そして,実際に提案手法を用いて実画像から平面検出を行った実験結果を示す.
[発表論文]
● “空間認識のためのKinectを用いた平面検出”,電子情報通信学会総合大会,D-12-72,福岡,Mar. 2016.