研究内容
- 筋骨格システムのモデル化と制御に関する研究
- 腱駆動ロボットに関する研究
- パラレルワイヤ駆動ロボットに関する研究
筋骨格システムのモデル化と制御に関する研究
人間は既存のロボットと比較して,器用で柔軟な運動を実現することができます.その主な理由として,「脳の運動生成原理」と「人体の構造」の二つの要素が深く関係していると考えられています.そこで本研究では,人間の運動生成原理を模倣したフィードフォワードとフィードバックを組み合わせた制御方法と,人体特有の構造が人間の運動に寄与することを明らかにし,ロボットの制御性能を向上させるための研究を行っています.
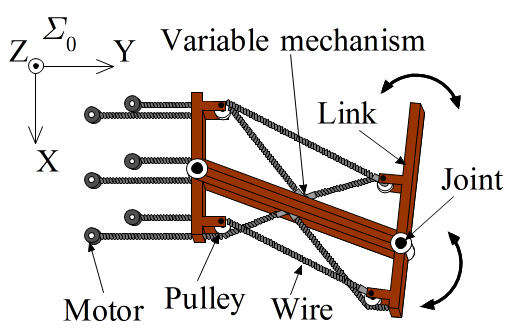
腱駆動ロボットに関する研究
人間のように関節の剛性を調節し,状況に応じた多様な運動を実現するため,リンク上に可変剛性機構を有する腱駆動ロボットを開発しています.リンク上に可変剛性機構を配置することで,新たにモータを追加せず,搭載済みのモータを使用して剛性機構の位置を制御することができます.このロボットを対象にセンサレスで位置・剛性制御が可能な制御方法を提案しています.
-
発表資料
- Y. Matsutani, K. Tahara, H. Kino and H. Ochi, "Stiffness evaluation of a tendon-driven robot with variable joint stiffness mechanisms'', Proceedings of the IEEE-RAS 17th International Conference on Humanoid Robotics, pp. 213-218, 2017.
パラレルワイヤ駆動ロボットに関する研究
準備中
〒811-0295
福岡県福岡市東区和白東3丁目30-1
福岡工業大学
福岡県福岡市東区和白東3丁目30-1
福岡工業大学
