学部3年生向け(研究室配属用)の研究室情報
※学外からもこのページを見れるように,10月9日までの期間限定でアクセス制限を解除しています.2025年9月に情報を更新しました.
なお,過去の卒研テーマは別ページにまとめています.そちらもご覧ください.
研究室見学について (2025年分)
研究室の場所はC棟6階,C69(教員居室)とC64(学生実験室)です.3年生の授業も考慮して,2025年は下記の太字の時間帯でC64で見学対応を行います.
※デモ実演の準備なども必要なため,対応時間を指定しています.
| 13:00~14:00 C64でデモ実演&卒研生も対応 | |
| (11:00~12:00 デモ実演なし,C69で簡単な質問対応のみ可) | |
| 11:00~12:00 C64でデモ実演&卒研生も対応 | |
| ※大学院進学を考えている人は9/30(火)までに一度連絡してください. | |
| (11:00~12:00 デモ実演なし,C69で簡単な質問対応のみ可) | |
| 11:00~12:00 C64でデモ実演&卒研生も対応 | |
| 13:00~14:00 C64でデモ実演&卒研生も対応 | |
| (11:00~12:00 デモ実演なし,C69で簡単な質問対応のみ可) | |
| 11:00~12:00 C64でデモ実演&卒研生も対応 | |
| 11:00~12:00 C64でデモ実演&卒研生も対応 | |
| (11:00~12:00 デモ実演なし,C69で簡単な質問対応のみ可) |
分かり次第,更新するので,訪問前に確認してください.
なお,見学の際に簡単なアンケートを実施し,どんな研究内容に興味があるかをお聞きします.
本研究室を第一志望とする人は必ず見学に来てください.
特に,大学院進学を考えている人は9/30(火)までに一度連絡してください.後からでは受け入れできない場合もあります.
上記太字の見学対応時間であれば,事前連絡は不要です.これ以外の時間は対応できない可能性が高いです.
研究テーマ
卒業研究では一人一人にそれぞれの研究テーマを設定します.サンプルプログラムを動かしてみたり,従来研究を調査しながら,どのような研究を行うのかを相談していきましょう.
本研究室で行っている研究のキーワード例を以下に挙げます.
| [研究分野] | 画像処理,知能ロボット,コンピュータビジョン,パターン認識,インタフェース,インタラクション |
|---|---|
| [使用機材] | 各種カメラ,距離センサ,ロボットアーム,ワークステーション など (下記参照) |
| [要素技術] |
特徴抽出,色抽出,エッジ検出 など (物や人などの)検出,追跡,姿勢推定,識別,形状復元 など 状況・状態の認識,ジェスチャ認識,システムの動作・行動計画 など |
| [応用例] |
スマートハウス(未来型住宅),見守り・介護支援,防犯,車の運転支援,スポーツ映像解析, サービスロボット,遠隔操作・監視,自律移動,災害対応,ナビゲーション(道案内,操作案内) など |
| [開発環境] |
主にWindows,Visual Studio Code,Python(またはC言語) 特にTensorFlowやKerasを用いた機械学習・深層学習(Deep Learning)/人工知能/画像認識 |
その他,ROS(Robot Operating System,ロボット用プラットフォーム,Linux系)なども導入予定です.
 |
 |
 |
なお,過去の卒業研究テーマの詳細はこちらにまとめています.
 カメラ&ロボットによる見守りシステム |
 姿勢推定,動作や状態の認識 |
 見守りロボットの開発 |
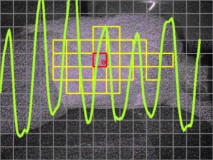 距離画像を用いた呼吸推定 |
 部屋の3次元モデルの作成 |
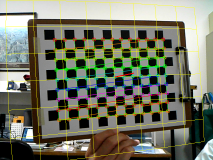 カメラパラメータ推定の様子 |
 姿勢推定,投球フォームの認識 |
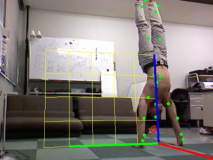 倒立姿勢の認識,状態判定 |
 ハンドジェスチャの認識 |
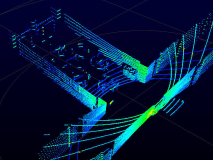 全方位LiDARを用いた環境認識 |
 物体の位置・姿勢推定,物体認識 |
 Deep Learningを用いた画像認識 |
研究室の特徴
『システム開発(プログラミング)がメイン』新しい理論やアルゴリズムを考えることももちろん必要ですが,
他の研究室に比べると,実際に手を動かしてプログラムを作り,試行錯誤を行う時間が多くなるでしょう.
『色々な研究機材やサンプルプログラムを準備』
各種センサやロボットなど,色々な機材を使って研究を行うことができます.
それらを動かすためのサンプルプログラムも(できるだけ)用意します.
また,研究を進めていく上で必要な機材があれば,(予算と相談して)随時購入していきます.
常に最新の設備を使用して研究を行うことができる反面,学生が「自宅で作業する」というのは難しいでしょう.
『フレックスタイム制』
毎週のミーティングは原則として参加必須ですが,それ以外の登校・帰宅時間は自由に設定して構いません.
ミーティングの際に,スライドを用いて研究の進捗状況を報告してください.
翌週までにどんなことをやるのかを相談しながら,着実に研究を進めていきましょう.
卒研スケジュール
卒業研究の大まかなスケジュールは以下の通りです.| 講習会,サンプルプログラムなどを用いた練習課題 | |
| 従来研究の調査,大まかな研究テーマの決定(1人1テーマ),グループミーティング開始 | |
| 研究室内で中間発表会,卒研の方向性と現状について報告 | |
| 夏休み,(就職活動の追い込み) | |
| より具体的なシステムの試作,解決すべき課題を確認 | |
| 課題に対する解決方法の検討,既存手法の調査 | |
| 研究室内で中間発表会(卒研予備審査) | |
| 論文執筆,追加実験など | |
| 卒研発表会,卒論提出 |
なお,本研究室では以下のミーティング(いわゆるゼミ)を行います.
| 全員で集まって口頭での簡単な現状報告,連絡事項の通達,講習会・勉強会 | |
| 3~4人程度の研究グループでの詳細な研究進捗報告,その後の方針の相談 |
この2つのミーティングは参加必須なコアタイムで,それ以外は基本的には自由なフレックスタイム制です.
(※フレックスタイム制とは,始業時刻や終業時刻を自由にずらせる制度であって,時間を減らせるものではありません.)
必要なもの (&卒研でしっかり身に付けてもらうもの)
1. やる気自分が楽しいと思える研究をやりましょう.
まずはサンプルプログラムを動かしてみたり,改造して遊んでみてください.
こんなことができたら便利だけど,実現するにはどんな課題を解決しなければならないか,というのが研究のスタートです.
2. プログラミング能力
C言語の基本的なプログラミングができれば大丈夫です.
卒研を進めながら,実践的なプログラミングを身に付けましょう.
逆に,プログラムを全く書きたくないという人には向いていないでしょう.
3. 数学知識
三角関数(sin,cos) ・・・ 物体の姿勢やロボットの回転量だけでなく,画像の類似度(相関)の計算などにも必須です.
代数幾何(行列,ベクトル) ・・・ 画像は輝度値が並んだ配列(ベクトル)です.3次元と2次元の座標変換なども行います.
微分積分 ・・・ 位置・速度・加速度の計算や,画像のエッジ検出(明るさの傾き変化)などで使用します.
確率 ・・・ 位置の予測など,パラメータ推定で少し必要になる場合があります.
なお,機械科や電気科の専門知識は無くてOKです.
基本的にプログラミングがメインになります.
たまに回路のハンダ付けなどが必要になることもありますが,経験者が1~2人いると嬉しいという程度です.
担当講義について
3年次の必修科目 『情報工学実験III』 の実験テーマ(Linux画像処理)は本研究室の内容にかなり関連があります.画像を使ったプログラミングに興味を持った人はぜひ見学に来てください.
なお,卒研では特にLinuxを用いる必要は無く,WindowsでVisual Studioが使えれば充分です.
3年次の選択科目 『ディジタル信号処理』 は履修している方が望ましいのですが,履修していなくても大丈夫です.
フーリエ変換そのものは卒研では扱いません.ただし,講義内で信号処理(画像処理)の基礎知識も紹介しています.
研究室配属後に講習会を開催し,より詳しい説明を行いますので,その時に勉強すれば大丈夫です.
2年次の必修科目 『論理回路』 は情報工学科の基礎的内容ですが,本研究室では回路設計などは扱いません.
ハードウェアの開発ではなく,ソフトウェア(プログラミング)がメインの研究室です.
授業(毎週の小テストや学習相談など)と同様に,着実に知識を習得していきましょう.
卒業研究とは
社会に出てから必要となる問題解決能力と,社会人としての一般常識や心構えなどを訓練するためのものです.『卒業制作』ではないので,「○○を作りました」というだけでは卒業研究にはなりません.
「こういう課題があって,自分はこのように解決しました」というのが必要になります.
現実世界で実際に動作するシステムを作ろうとすると,様々な課題に直面するでしょう.
社会人の常識として,遅刻や無断欠席は厳禁です.
何回まではOK,というのはありません.
取引相手との打合せをすっぽかしたら,一発で仕事は無くなります.
社会に出ると,様々なタスクを並列に処理する必要が出てきます.
複数の業務が並列に進行しながら,色々な雑用も降ってきます.
本研究室では,意図的に複数のタスクを異なる〆切で並列に課し,スケジュールを立てたり,修正する訓練も行います.
スケジュールを考える際,次のような優先順位を意識するようにしてください.
1: 自分が終わらせないと,他の人に迷惑をかけてしまうもの.
2: 期限までに必ず終わらせなければならないもの.
3: 〆切を延ばすことが可能なもの.ただし,期限後に「できませんでした」はダメで,事前相談が必要です.
4: 自分ができない場合には他人に代わってもらうことが可能なもの.これも早めに連絡する必要があります.
また,「できることだけをやる」のではなく,「できないかもしれない」ことにも挑戦してください.
成功した結果だけでなく,失敗した結果(詳しい実験データやアルゴリズムなど)も報告してください.
どうすれば解決できるかを一緒に相談しましょう.
100%の力で課題をこなすのではなく,時には(時間的・能力的に)120%で頑張れる人が社会でも求められるでしょう。
必要な時には全力以上で頑張る分,息抜きするのもOKです.
本研究室では,7月末に研究室内で卒業研究の中間発表会を行います.
就職活動での採用面接の際,卒研でどんなことをやっているのかを聞かれることもあるでしょう.
その際,研究内容そのもの(企業に合っているか)はあまり重要ではなく,
問題解決能力やコミュニケーション能力・説明能力などがチェックされるでしょう.
毎週のミーティングで研究の進捗状況をプレゼンしてもらい,このような訓練も行います.
研究設備の紹介
研究室にある設備から,どんな研究を行っているかが何となく分かると思います.研究に必要なものがあれば,随時購入します.
本研究室では,研究成果を出しつつ,研究費を獲得することにも力を入れています.
カメラ・センサ類
 |
RGB-Dカメラ (Microsoft, Kinect v1) 赤外線を用いた深度センサを内蔵したカメラです. 赤外線パターンを投影し,その歪み方から距離を計測します. 人の姿勢情報を簡単に取得でき,ジェスチャ認識などに利用できます. |
|---|---|
 |
RGB-Dカメラ (Microsoft, Kinect v2) Time of Flight(TOF)方式が採用されたKinectです. 赤外線を投射し,対象に反射して戻ってくるまでの時間から距離を計測します. v1同様,ジェスチャ認識などの研究で使用します. |
 |
RGB-Dカメラ (Microsoft, Azure Kinect) より高性能で,小型になった新型のKinectです. GPUを搭載したPCなど,開発に必要なスペックも上がっています. Kinect v2と同様に,赤外線を投射して対象までの距離を計測できます. 人物の姿勢推定やジェスチャ認識などの研究で使用します. |
 |
ステレオカメラ (Point Grey, Bumblebee 2) レンズが2つあるカメラです. 三角測量の原理により,物体までの距離が取得できます. |
 |
サーモグラフィカメラ (Optris, PI400) 温度を測定できる赤外線サーモグラフィカメラです. 人の体温を測定する見守りロボットの開発を行っています. |
 |
その他のWebカメラ 普通のUSBカメラなども,必要に応じて使用します. |
 |
レーザー距離センサ (北陽電機, UTM-30LX) レーザー光を用いて,周囲の物体までの距離を測定するセンサです. 移動ロボットによる障害物(壁など)の検知に使用します. |
 |
全方位LiDARセンサ (Velodyne, VLP-16) 水平全方位360°,垂直視野30°の3次元データを取得できます. 自動運転車の開発にも採用され,近年,急速に普及している技術です. (現時点では車本体よりも高価なセンサですが.) |
 |
モーションコントローラ (Leap Motion, Leap Motion Controller) 赤外線LEDとカメラにより,手や指の3次元位置を高精度に取得できるセンサです. ハンドジェスチャの認識や,ユーザインタフェースに関する研究で使用します. |
 |
モーションセンサ (Nintendo, Wiiリモコンプラス) 3軸のモーションセンサ(加速度計)を内蔵したコントローラです. PCとBluetoothで接続し,情報を取得することができます. ロボットの操作や,インタラクションに関する研究などに使用します. |
 |
二酸化炭素濃度センサ (ZMP, CO2SEN) 空気中の二酸化炭素濃度を計測するセンサです. 日常生活支援や見守りに関する研究で使用します. (部屋の状態監視や,人の呼気検出など) |
ロボット等
 |
ロボットアーム (DOBOT, DOBOT Magician) 小型のロボットアームです. グリッパーで物を掴んだり,吸引カップで吸い付けたりできます. カメラと連携させ,物体を認識しながら操作する開発を行っています. |
|---|---|
 |
車輪ロボット (MobileRobots, Pioneer 3-DX) PCで制御できる車輪ロボット(3輪台車)です. 特定の人物を追従する付き添いロボットの開発を行っています. |
 |
移動ロボット (iRobot, Roomba 770) 家庭環境用の移動ロボットです. PCで移動制御を行い,生活支援や見守りに関する研究で使用します. 研究室を掃除することもできます. |
 |
組み立てロボット (LEGO, MINDSTORM EV3) レゴブロックを組み合わせたロボットです. 移動ロボットやロボットアームとして使用するだけでなく, 各種センサ値を取得したり,サーボモータの制御機構として使用します. |
 |
パン・チルト制御ユニット (SUSTAINable Robotics, PTU-D46) PCで制御できる電動の雲台です. カメラの方向制御などに使用します. |
パソコン等
 |
デスクトップパソコン 学生一人一人にそれぞれ机とデスクトップPCを割り当てます. 機械学習を用いた研究を行うために,GPUを搭載したPCを増やしていっています. 研究テーマによっては,ノートPCやタブレット端末も使用します. |
|---|---|
 |
ワークステーション ディープラーニング用の高スペックマシンです. NVIDIA RTX A6000グラフィックスカード(48GB)を2枚搭載しています. 時間がかかる学習処理を高速化し,効率良く研究を進めることができます. 消費電力が大きいため,研究室の電源増設工事も行いました. |
 |
ノートパソコン ロボット制御やプレゼン用にノートパソコンを使用します. 実時間処理を実現するために,ノートパソコンも高スペックなものを使用しています. |
 |
タブレット端末 AndroidやiOSに対応した機器の制御などに使用します. 見守りシステムの情報提示端末などにも使用します. |
 |
ネットワークハードディスク 過去のデータを蓄積するためのサーバー用の記憶装置です. 停電時に自動停止するように無停電電源装置(UPS)を備えています. |
 |
プリンタ 学生の居室にもカラーのプリンタがあります. コピー&スキャナ機能も付いています. 研究目的なら,自由に使用して構いません. |
その他
 |
大型テレビ (SHARP, AQUOS LC-52XL10) 研究打合せやプレゼン用の52インチディスプレイです. 日常の生活支援や,映像解析などに関する研究でも使用します. 実環境での実験を行うため,アンテナ線も繋がっています. |
|---|---|
 |
LEDライト (Philips, hue LEDランプ) Wi-Fiで制御できるLEDライトです. 生活支援やスマートハウスに関する研究で使用します. |
 |
赤外線送信器 (Bit Trade One, 赤外線リモコンキット) PCからリモコンと同じ赤外線を送信し,TVなどを制御できます. 生活支援やスマートハウスに関する研究で使用します. |
 |
TVキャプチャーBOX (I-O DATA, GV-MVP/XZ3) テレビ映像をPCで録画・再生するためのキャプチャーBOXです. スポーツ中継などの映像解析の研究で使用します. |
 |
バッテリ類 カメラや各種センサを使用するためのバッテリです. 特に屋外や,移動ロボットに搭載して使用するために必要です. |
 |
コントローラ ワイヤレスのコントローラです. 移動ロボットの手動操作時などに使用します. |
 |
書籍 研究を進めていくのに参考になりそうな書籍類です. 必要なものはどんどん購入していきます. |
 |
光学式三次元動作分析装置 (VICON,VICON NEXUS) 5台の赤外線カメラを用いたモーションキャプチャシステムです. 体にマーカを取り付け,詳細な三次元姿勢や動作を計測します. 大学が所有する装置ですが,自由に利用することが可能です. |
研究室の様子
興味を持った人はぜひ見学に来てください. 学生用の机 |
 実験用スペース |
 少人数用ミーティングスペース |
 全体ミーティング(ゼミ)の様子 |
 2015年度 歓迎会 |
 卒研中間報告会 (2015年冬) |
 オープンキャンパス (2016年) |
 RKBテレビの取材 |
 ICITEE2014 Best Paper Award |
研究室配属 FAQ
最後に,研究室配属についてよく聞かれる質問をまとめました.・ ゼミは週に何回?
本研究室では,全員で集まって連絡事項を伝えたり,勉強会を行う「全体ミーティング」が週1回と,
3~4人の研究グループで進捗報告を行う「グループミーティング」が週1回,合計で週に2回です (詳細は上記参照).
ただし,ゼミが週2回の研究室に比べて,週1回の研究室の方が楽だとは限りません.
学生一人一人にかけている時間が多く,面倒見が良い研究室の方が結果的には楽だと思います.
また,毎週の進捗報告は,発表の練習を行う場でもあり,自分を成長させることができる機会でもあります.
・ プログラミング能力はどれくらい必要?
C言語の基本 (for文や配列など) が理解できていて,簡単なサンプルプログラムが読めれば大丈夫だと思います.
各センサを動かすサンプルプログラムは用意しますし,プログラミングのサポートも行いますので安心してください.
詳しくは,本研究室の卒研生に実際に話を聞いてもらうのが良いと思います.