研究紹介
これまでに行ってきた研究の紹介です.
現在は行っていない(機材がない)ものもあります.
新しい研究内容については随時追加していく予定です.
※学部3年生向け(研究室配属用)の研究室紹介ページはこちら(学内限定)です.
また,過去の卒業研究はこちら(学内限定)にまとめています.
環境センサと移動ロボットを連携させた見守りシステムの開発
カメラを用いて人物を発見・追跡し,姿勢情報から人物の行動や状態を認識します.そして,異常が生じた場合には,ロボットが近づいて人物の詳しい状態を確認し,状況に応じて通報などを行います.
(豊橋技術科学大学,2013年4月~現在,福岡工業大学でも継続)

参考: 国際会議ICITEE2014で Best Paper Award を受賞しました.
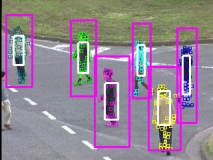
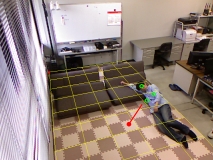
移動ロボットのための複数人物追跡
歩行者や障害物を避けながら,特定の人物を追従する自律移動ロボットです.ロボットカメラで撮影した動画像から,複数の歩行者を検出・追跡します.
ロボット展などの展示会で実際にデモンストレーションを実施しています.
(豊橋技術科学大学,2008年3月~現在,福岡工業大学でも継続)



参考: RKBテレビの「今日感ニュース」やKBCテレビの「アサデス。KBC」で紹介されました.
インタラクティブな情報提示システムのための視線推定
画像から非言語情報(顔向き,視線方向,頷き,首傾げなど)を抽出し,ユーザの興味や反応を認識するシステムを開発しました.
大型ディスプレイを用いてインタラクティブな情報提示を行います.
カメラ3台を用い,精度3度,30fpsで動作する視線推定システムを構築しました.
(情報通信研究機構,2006年4月~2008年2月)



対話型インタフェースロボット
センサや機器がネットワークで結合された未来型の住宅において,ユーザの状況に応じた生活支援サービスを提供するシステムの開発を行いました.
そして,実際に2LDKの実験住宅で一般の家族4組,それぞれ2週間の生活実証実験を実施しました.
特に対話型ロボット「Phyno(フィノ)」の開発を担当し,ヒューマンインタフェースに関する研究を行いました.
(情報通信研究機構,2004年7月~2006年3月)


参考: NICT-News.麻生総務大臣(当時)や野田聖子議員に研究紹介を行いました.
動画像処理
動画像からの複数人物追跡や3次元姿勢推定,物体形状復元などに関する研究を行ってきました.(岡山大学,1997年4月~2004年6月)