筋骨格系ロボットの運動制御の研究
研究背景
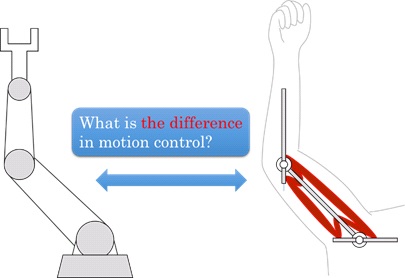
私たち人間など,「筋骨格系」によって身体を運動させる生物が存在します。「筋骨格系」は,「骨」同士が連接して構成される「関節」が「筋肉」によって駆動される系で,筋肉が張力しか発生できないことや,二つ以上の関節を同時に駆動する筋肉(「多関節筋」と言います)の存在に,この系の特徴があります。その特徴は,産業用ロボットなどで採用されている,それぞれの関節を独立したモータによって駆動する系のものとは異なっています。
筋骨格系の特徴をロボット工学の観点から考察し,また,ロボット制御に活用することは,今日,ロボット研究者の関心を集める研究テーマの一つです。これまでに例えば,人間の腓腹筋(膝とくるぶしを同時に駆動する筋肉)の存在が,脚でジャンプするときの跳躍高さの向上に貢献することや,上腕二頭筋や上腕三頭筋といった,肩と肘を同時に駆動する筋肉の存在により,人間の腕は,ロボットアームに比べて,対象物に容易に力を加えることのできる力学構造になっていることが示されています。
なお,多関節筋のうち,二つの関節を同時に駆動する筋肉のことを「二関節筋」と呼びます。以後の説明の中ではこの名称を用います。
研究内容
人間が自分の手先をある位置から別の位置に動かすような運動制御(制御工学では「PTP制御」と呼ばれます)でも,筋骨格系の持つ特徴がフィードフォワード方式による運動制御を可能にすることが理論的に示されています.フィードフォワード方式とは,運動制御中の関節角度情報のフィードバックを必要としない制御の方式のことです.しかしながら,運動制御の場合,二関節筋の存在が制御にどのように貢献しているのかが,先述の「ジャンプする場合」などと比べるとはっきりしません。実際,フィードフォワード方式による運動制御において,二関節筋の存在は,理論上は必須ではありません。
そこで本研究テーマでは,筋骨格系による運動制御において,二関節筋がどのような役割を果たしうるのかを調べています。例えば,人間の腕のような,肩と肘に相当する二つの関節を,単関節筋(一つの関節だけを駆動する筋肉)と二関節筋,それぞれに相当するアクチュエータ(以後は単に「単関節筋」「二関節筋」と記します)で駆動する平面ロボットアームを考えます.ロボットアームの関節数よりアクチュエータ数が多いため,ロボットアームをある目標姿勢に到達させることのできるアクチュエータ発生力の組合せは複数存在します。それらのうち一部の組合せでは,二関節筋が取り除かれた(つまり,単関節筋だけで駆動される)ロボットアームの場合と,制御の様子が類似することを,本研究ではこれまでにシミュレーションを通じて示しています。
今後はさらに,センサ系とのつながりの中で,筋骨格系による運動制御における二関節筋の役割について,研究を進める予定です。
研究成果
- Tetsuya Morizono, Kenji Tahara and Hitoshi Kino: A study on effect of biarticular muscles in an antagonistically actuated robot arm through numerical simulations, Artificial Life and Robotics, Vol. 22, No. 1, pp. 74-82, DOI: 10.1007/s10015-016-0322-5, 2017
- Tetsuya Morizono, Kenji Tahara and Hitoshi Kino: An experimental study on effect of biarticular muscles in an antagonistically actuated robot arm, Proc. the Twenty-First International Symposium on Artificial Life and Robotics (AROB 21st 2016), pp. 475-478, Beppu, Oita, Japan, January 20-22, 2016
- Tetsuya Morizono, Kenji Tahara and Hitoshi Kino: Experimental Investigation of Contribution of Biarticular Actuation to Mappings between Sensory and Motor Spaces, Proc. 41st Annual Conference of the IEEE Industrial Electronics Society (IECON2015), pp. 3573-3578, Yokohama, Japan, November 9-11, 2015
