剛体リンクを持つ着用型ロボット関節機構の設計の研究
研究背景
着用型ロボットにおいて,ロボットの着脱を容易にすることや着用者への親和性を高めることは今なお,主要な技術課題であると言えます。この技術課題を解決する方向性の一つとして,日常の着衣のような着用感が得られるようにロボットの機構を設計したり,ロボットのアクチュエータを制御したりすることが考えられます。そのために例えば,衣服のような柔らかい素材を用いて,ロボットの機構を設計するという試みもあります。しかし,ロボットを着用して操作する対象物の重量をロボット自体に支持してほしい場合などでは,産業用ロボットなどと同様の「硬いリンク」(剛体リンクと言います)を持ったロボット機構が望まれることも考えられます。
研究内容
剛体リンクと関節が連鎖する「硬い構造」を採用する場合,構造自体に衣服のような「柔らかさ」を求めることは難しいと考えられます。そこで,ロボットの振る舞い(運動)が日常の衣服に近づくように,関節の配置やアクチュエータの制御に工夫をすることを考えます。
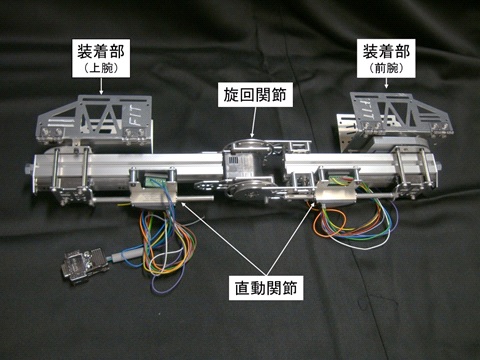
図1:肘の運動補助を目的とした着用型ロボット機構の試作
図1は,人間の肘の運動補助を想定した,肘周りに着用するロボット機構の試作です。人間の肘の運動補助は旋回関節で行いますが,この旋回関節の位置は,上腕側と前腕側に設けた二つの直動アクチュエータで移動できるように設計されています。肘の運動補助を受ける着用者がロボットから感じる違和感をできるだけ小さくするためには,旋回関節が着用者の肘のできるだけ近傍に位置することが必要です(※1)。そこで,二つの直動アクチュエータを制御して,旋回関節の位置を自動的に肘の近傍に調整できる方法を,今後研究できればと考えています。
この方法が実現できれば,二つの装着部でロボットの機構を肘周りに固定するとき,着用者は「旋回関節の位置が肘の近くに来るように調整すること」を考えなくてもよくなります。このことにより,「装着時における旋回関節の位置の調整」の手間が軽減され,より容易に着脱できるロボット機構になるものと期待されます。
(※1)より正確には,「旋回関節の回転軸と人間の肘の屈伸運動の回転軸とが極力一致すること」が必要です。
