直動関節駆動による着用型前腕運動補助ロボット機構の研究
研究背景
着用型ロボットにおいて,ロボットの着脱を容易にすることや着用者への親和性を高めることは今なお,主要な技術課題であると言えます。この技術課題を解決する方向性の一つとして,日常の着衣のような着用感が得られるようにロボットの機構を設計したり,ロボットのアクチュエータを制御したりすることが考えられます。そのために例えば,衣服のような柔らかい素材を用いて,ロボットの機構を設計するという試みもあります。しかし,ロボットを着用して操作する対象物の重量をロボット自体に支持してほしい場合などでは,産業用ロボットなどと同様の「硬いリンク」(剛体リンクと言います)を持ったロボット機構が望まれることも考えられます。
研究内容
この研究では,人間の肘の屈伸運動と前腕の回転運動(より正確には「回内・回外運動」)を同時に補助する着用型ロボット機構を考えています。本研究室のサイトの別のページで,「人間の肘の運動補助を担う旋回関節の位置を直動アクチュエータによって制御する」という考え方に基づいた着用型ロボット機構の設計の研究もご紹介していますが,その考え方を肘の屈伸運動と前腕の回転運動とを同時に補助する場合に拡張すると,運動を補助する関節(旋回関節や回転関節)と関節の位置を移動するアクチュエータが二組必要となるため,機構のハードウェア設計がより複雑になることが予想されます。
そこでこの研究では,運動補助を,旋回関節や回転関節に頼らずに行うことを考えています。ロボットには旋回関節,回転関節,直動関節の三種類の関節がありますが,「前者の二つに頼らない」ので,直動関節だけを使うことになります。一方,人間の肘の屈伸や前腕の回内・回外はいずれも旋回運動もしくは回転運動ですから,これらの運動の補助に直動,つまり,回転しない関節を使うことには無理があるようにも感じられます。しかし,設計を工夫することにより,直動関節で旋回運動や回転運動を補助することは可能であり,そのような機構の試作例(モックアップ)が,図2に示すものです。
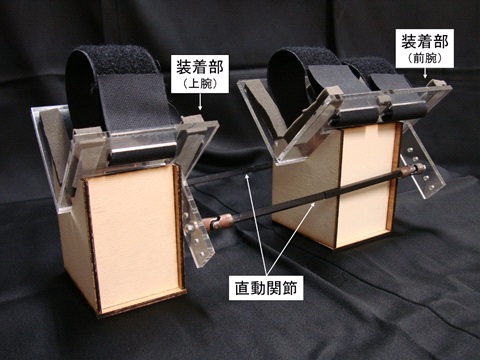
図2:着用型前腕運動補助ロボット機構モックアップ(木箱は据え置くための台)
図2はモックアップなので,直動関節にはアクチュエータは設けられていませんが,この機構を人間の腕に装着した場合,この機構が運動補助の制御なしにどの程度,人間の腕の運動に親和できるかを,このモックアップと運動計測ができるセンサとを使って調べています。今後の研究課題として,人間に装着するときのこの機構の力学特性の解析や,直動アクチュエータを備えた機構の試作を考えています。
図2の機構では運動補助が直動関節により行われるため,機構の旋回関節や回転関節の回転軸を人間の肘の屈伸運動や前腕の回転運動の軸に合わせるという「調整」の必要がありません。このことによって,機構を装着する手間が軽減され,着脱が容易にできるロボット機構の実現が期待できます。
研究成果
Morizono Tetsuya et al.: Evaluating Wearing Mobility of Wearable Robot Mechanisms Based on Measurement, Int. J. Space-Based and Situated Computing, Vol. 6, No. 4, pp. 209-220, DOI: 10.1504/IJSSC.2016.082762, 2016
関連研究
Tetsuya Morizono and Motoki Suzuki: Design of a 2-DOF Wearable Mechanism for Support of Human Elbow and Forearm, The 3rd International Conference on Intelligent Robotics, Automations, Telecommunication facilities, and applications, Fukuoka, Japan, July 8-10, 2013 (included in Lecture Notes in Electrical Engineering Volume 253, Information Technology Convergence, pp. 1027-1035, Springer, 2013)
