情報システム工学実験Ⅲ・Ⅳ
2015年度からのカリキュラムで新設された3年次配当の必修科目「情報システム工学実験Ⅲ」および「情報システム工学実験Ⅳ」では基本的に,4年次の卒業研究の配属予定研究室で実験を行います。森園研究室では,卒業研究活動を円滑に行うための準備として,以下の4つの項目について,基礎を習得するための授業を計画しています 。
- ロボットのハードウェアを自作するための機械設計と機械加工
- ロボットを制御するためのプログラミング
- 人間やロボットの運動などを計測するセンサの取り扱い
- ロボット工学の理論に基づいたセンサデータやロボット機構の解析
情報システム工学実験Ⅲ(前期)
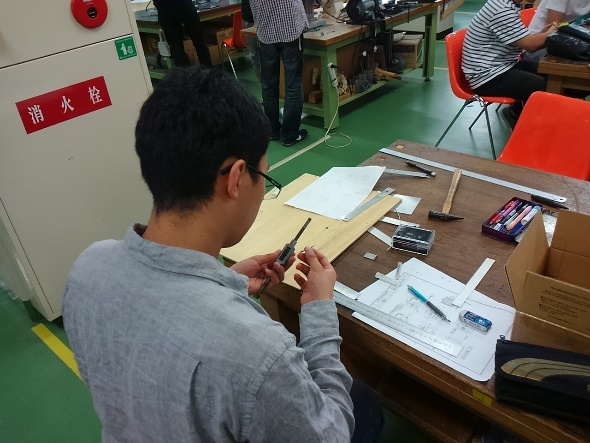
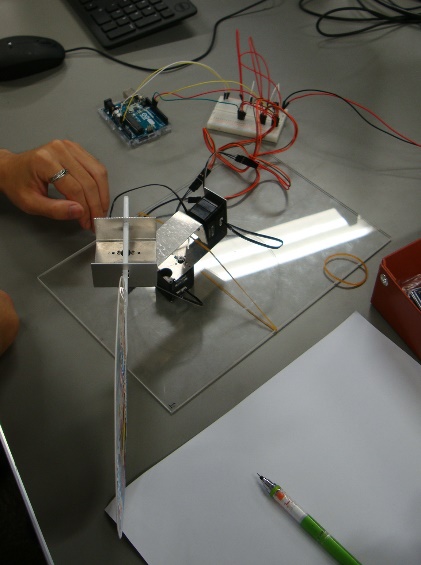
上記の4つの項目のうち,前半の二つ(1と2)を扱います。この実験において与えられるテーマはただ一つ,「(与えられた条件の下で)ロボットアームのハードウェアを設計・製作し,さらにロボットの動作を設計してプログラミングにより実現する」ことです。教員から助言や支援は得られますが,完成に至るまでに必要な作業の内容やスケジュールは,チームメイトと協力しながら自ら立案します。もちろん,ロボットアームとその動作は,発表会の実施日に間に合うように完成させることが必要です。
写真は,今年度の3年生が実験に取り組んでいる様子です。全員が機械設計も機械加工も初めてですが,試行錯誤を繰り返し,ときには失敗も経験しながら,設計や加工に必要な知識や技量を習得しています。機械加工や一部の部品の調達には,学内のものづくりを支援する教育施設である「モノづくりセンター」を利用しています。ロボット制御にはArduinoを用い,いわゆる「組込みプログラミング」により,サーボモータの角度制御を実現します。


情報システム工学実験Ⅳ(後期)
上記の4つの項目のうち,後半の二つ(3と4)に焦点を当てた授業を計画しています。人間の身体に装着して利用することを前提とし,人間の身体運動の支援を目的とする,いわゆる「ウェアラブル(着用型)ロボット」の研究では,装着感(着け心地)を客観的な指標で評価することも必要です。そのためには,ロボット機構を装着した状態で,人間とロボット機構の両方の動きを計測し,得られた計測データを解析することが必要です。
運動計測には「磁気センサ(装置は学科で所有)」という,複数のセンサの位置と姿勢(角度)を同時に測定できる,特殊なセンサを使います。それぞれのセンサは座標系を持っており,「基礎ロボット工学(2年次必修)」で学んだ「同次変換行列」を活用して,座標系間の相対的な位置や姿勢を表現します。ただし,この表現は行列形式なので,そのまま装着感の指標として使うには適しません。この行列形式の表現を,その本質を失うことなく,指標という「(優劣の)わかりやすい量」に変換する方法・・・を実験の中で,みなさんに考えて頂ければと思っています。
関連文献(情報システム工学実験Ⅳ)
Tetsuya Morizono, Shuhei Oda, Takashi Motomura, Kazuya Sakamoto, Shutaro Takeshita and Hiroyuki Matsubara: Evaluating Wearing Mobility of Wearable Robot Mechanisms Based on Measurement, International Journal of Space-Based and Situated Computing, Vol 6, No. 4, pp. 209-220, DOI: 10.1504/IJSSC.2016.082762, 2016
