Robotic Manipulation and Hand Mechanics
We aim to understand the mechanism of object manipulation by both robots and humans. Our research interests are along robotic manipulation by robot hands and industrial manipulators, motion analysis of human body during object handling, physiological mechanism of muscle-tendon complex of human hand, and other related fields. Dept. of Intelligent Mechanical Engineering, Faculty of Engineering, Fukuoka Institute of Technology
Dept. of Intelligent Mechanical Engineering, Faculty of Engineering, Fukuoka Institute of Technology3-30-1 Wajirohigashi, Higashi-ku, Fukuoka, Japan
Access and Campus map
News
Researchj
Our journal paper has been published on Journal of Robotics and Mechatronics. Considering force equilibrium and geometric constraitns, we present an assembly strategy with a single robotis manipulator.
S. Makita and Y. Honda: ``Mechanical and Geometric Constraints for Robotic Assembly with a Single Manipulator,'' Journal of Robotics and Mechatronics, Vol. 37, No. 3, pp. 731--741, Jun 2025.
- Abstract and Full-text (Open Access) on Fuji Technology Press Ltd. doi: 10.20965/jrm.2025.p0731
Research
Our conference proceeding has been published at the 29th International Symposium on Artificial Life and Robotics. We propose a material classfication method with analyzing thermal images of the object's heat transfer.
Ken Lertdumronglak and Satoshi Makita: ``Material classification using heat transfer analysis with infrared camera,'' 29th International Symposium on Artificial Life and Robotics, GS31-5, Beppu, Jan. 2024.
- Congratulations! The first author, Ken won a Young Author Award at AROB-ISBC-SWARM 2024.
Research
Our OPEN ACCESS paper has been published on Journal of Robotics and Mechatronics (Fuji Technology Press). We propose a through-hole detection from a point cloud to aim to hook an object, as humans do that for a mug.
K. Makihara, T. Otsubo, and S. Makita: ``Through-hole Detection and Finger Insertion Planning as Preceding Motion for Hooking and Caging a Ring,'' J. of Robotics and Mechatronics, Vol .35, No. 3, pp.734--742, June 2023.
- Abstract and Full-text (Open Access) on Fuji Technology Press Ltd. doi: 10.20965/jrm.2023.p0734
Research
Our OPEN ACCESS paper has been published on International Journal of Automation Technology (Fuji Technology Press). We propose a method of direct teaching (robot programming) using a virtual reality device.
S. Makita, T. Sasaki and T. Urakawa: ``Offline Direct Teaching for a Robotic Manipulator in the Computational Space,'' Int. J. of Automation Technology, Vol. 15, No. 2, pp. 197--205, Mar. 2021.
Info
S. Makita had moved to Fukuoka Institute of Technology on April 2020.
Research
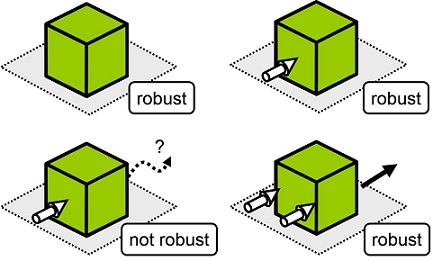
We present an evaluation framework for caging grasps, where the captured object is prevented from moving by both geometrical arrangement of robots and mechanical interferences. Our evaluation index based on robustness measure in robotic grasping and contact tasks is available to deal with such different properties simultaneously.
S. Makita and K. Makihara: ``Homogeneous Quantitative Measure of Caging Grasps with both Geometrical and Mechanical Constraints,'' 19th International Conference on Control, Automation and Systems, pp. 311--316, Jeju, Korea, Oct 2019.
- Abstract and Full-Text on IEEEXplorer DOI: 10.23919/ICCAS47443.2019.8971548
- Accpeted version of manuscript (1.6MB)
- Presentation Slides on SlideShare
Research topics
Analysis and planning of robotic manipulation
Mechanics of manipulation
In robotic manipulation, robots and the circumstances apply contact forces to target objects and grasp and manipulate the objects. Hence analyses of contact and other external forces plays an important role in order to execute appropriate such contact tasks. We study constraint conditions on frictional forces for fair analyses of contact forces and propose various applications of the analyses.
Caging
Caging is a geometical capturing method where a target objects are surrounded by robots and are prevented from escaping from the robotic cage. An advantage of caging is that it is achieved even by position-controlled robots and requires only geometrical features of objects, which can be acquired by cameras and range sensing. We call caging grasps by a multifingered hand in 3D space as "3D multifingered caging" and propose formulation of sufficient conditions and object perception for motion planning.

Mechanical and physiological analyses of human hands and its applications to sports
physiological analysis of the elas
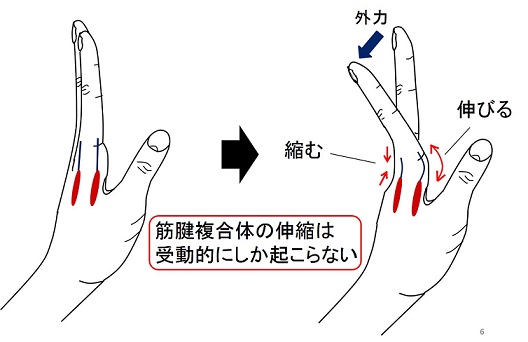
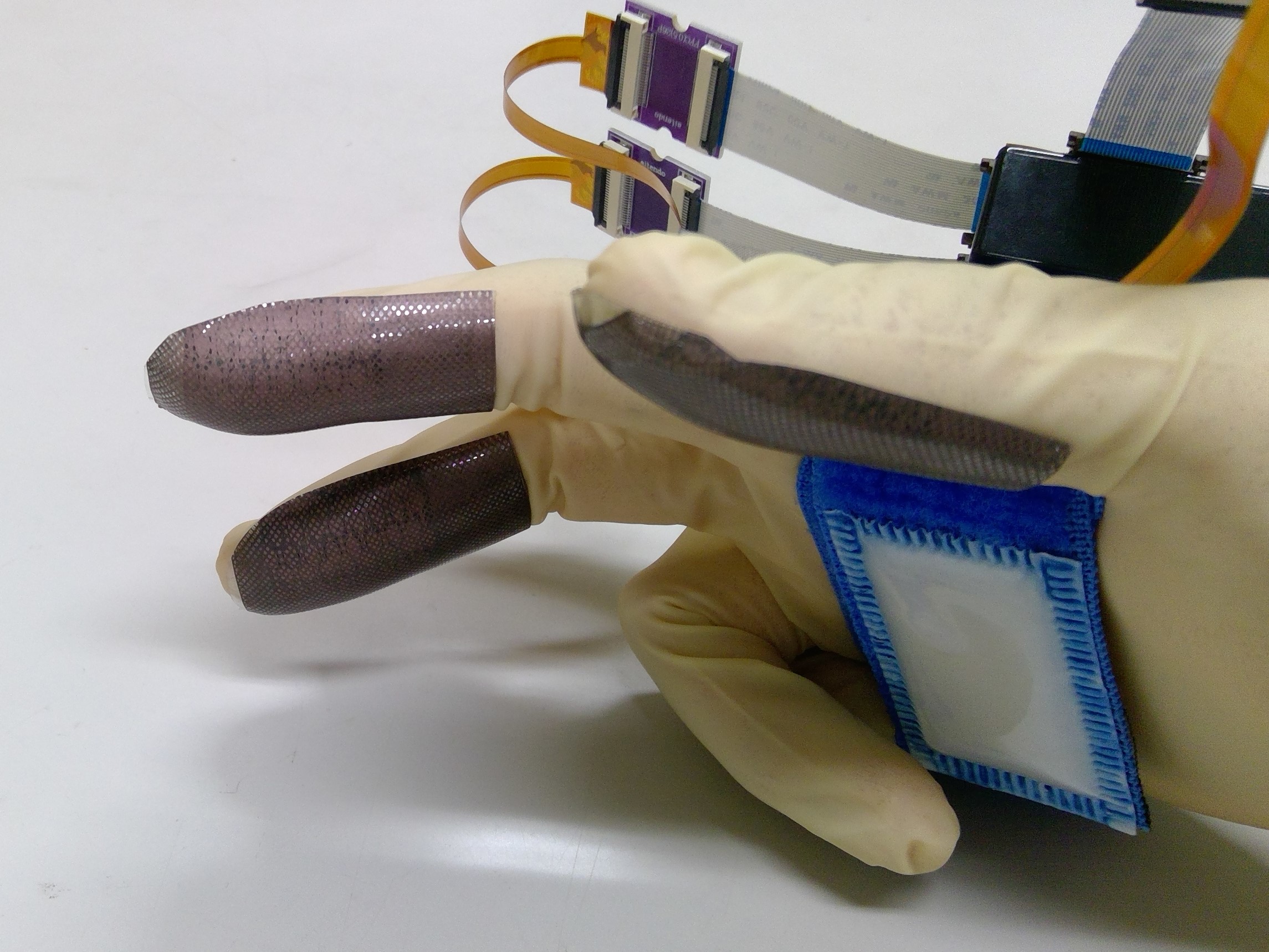
"Muscle-tendon complex" is a name for organs consisting of muscles and tendons in human bodies. Tendons connect muscles and bones and are seldom stretched by muscular tension. However, external forces applied to the muscle-tendon complexes can stretch the tendons, which behave as springs. The spring resiliences exert larger forces and quicker motion than those generated only by muscles. We use ultrasonic images to observe the internal muscle-tendon complexes to analyze the elasticity and mechanical characteristics of human hands
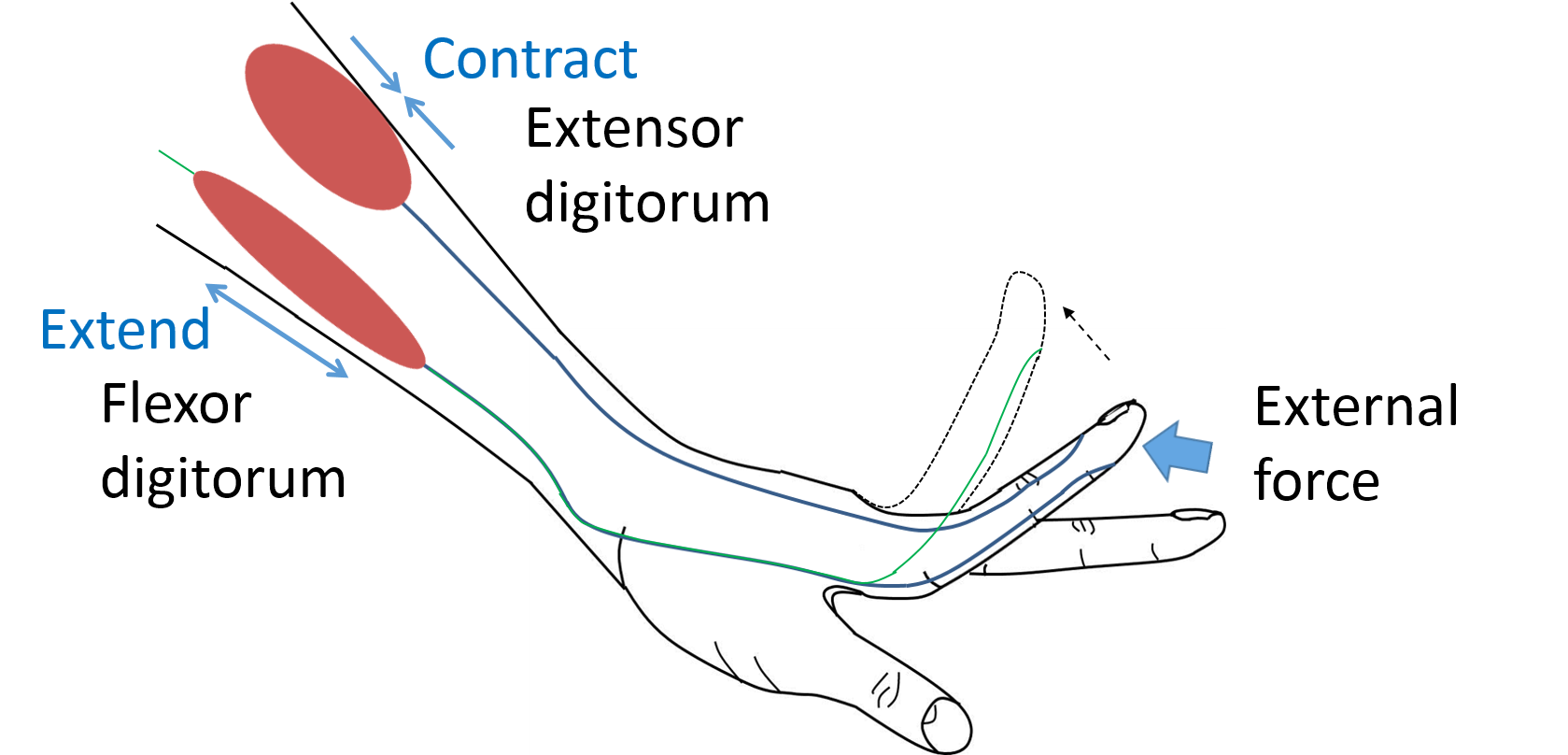
Motion analysis of overhead pass in volleyball
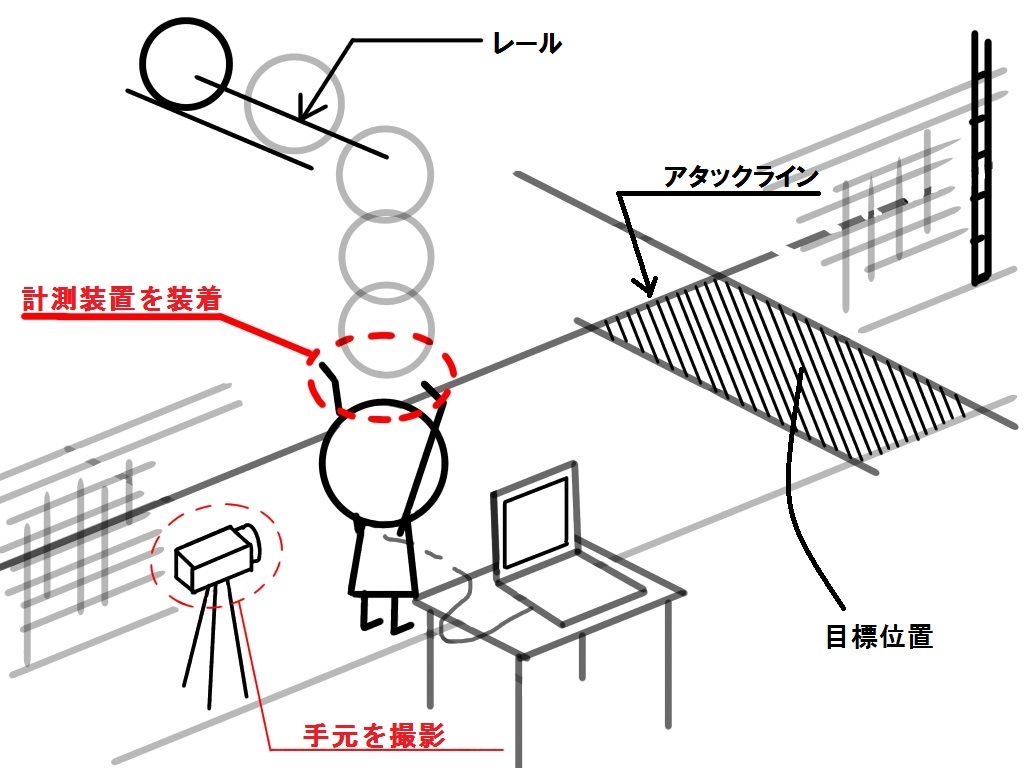
Overhead pass in volleyball is a combinational motion consisting of catching a ball instantly and releasing the ball, which is performed within 100ms. The elasticity of human hands will contribute to the motion, where the finger's Flexor Digitorum is in a stretching-shortening cycle. We measure the motion of human hands and a ball in the motion and derive the physical model of an overhead pass. The model may assess the sports performance quantitatively.
 Picked up publications
Picked up publications
Journal Papers
S. Makita and Y. Honda: ``Mechanical and Geometric Constraints for Robotic Assembly with a Single Manipulator,'' Journal of Robotics and Mechatronics, Vol. 37, No. 3, pp. 731--741, Jun 2025.
Conference proceedings
S. Makita, A. Hayashida and T. Otsubo: ``A Discrete Exploration of Object Configuration forThree-dimensional Caging Grasps,'' JSME-RMD Int'l. Conf. on Advanced Mechatronics, pp. 231--232, Kitakyushu, Nov 2024.