
- ロボットによるさまざまな物体操作(ロボティクスフォーラム2010発表資料,PDF(315KB))
- 義手による物体操作性の向上を目指すケージング把持(ロボティクスフォーラム2011発表資料,PDF(107KB))
- 卒業研究テーマなど
- 発表文献リスト
- 発表スライド,ポスター
ロボットマニピュレーションの解析と計画
マニピュレーションの力学
ロボットによる物体操作(ロボットマニピュレーション)では対象物に対してロボットや環境から接触力がはたらくことで,物体を保持したり,あやつりを実行したりできます.
そのため,この接触力を解析することは物体操作が狙い通りに実行できるかどうかを考える上で重要です.
接触力解析では,パラメータが少なくて解析が容易な,剛体モデル(いかなる力が加わっても変形しない物体)が多用されます.
本研究ではこの剛体モデルにはたらく摩擦力の制約条件を検討し,接触力の解析とその応用に取り組んでいます.
このときに重要なことは,「剛体モデルを用いて,実際の物理現象に対応するように近似する」ことです.
提案する接触力解析は静的に行われる把持(物体を掴んで持つ,グラスピング)や準静的に行われるグラスプレス・マニピュレーション(物体を持ち上げずに,押したり転がしたりする操作)に適用しています.
<Grasping>
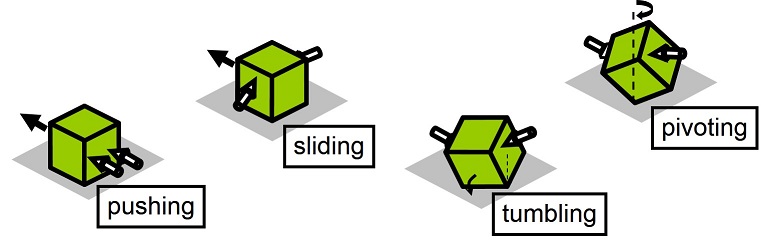
<Graspless manipulation>
さらにこの接触力解析を応用し,操作のロバスト性評価(操作が外乱に影響されず計画どおりに実行できるかどうか)や,操作を実行するときの関節トルクの最適化にも取り組んでいます.
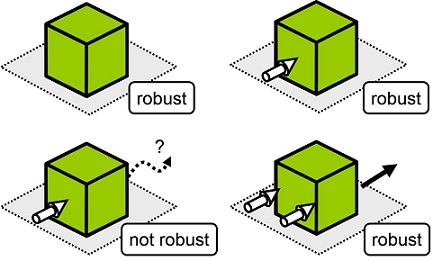
<Robustness evaluation for pushing manipulation>
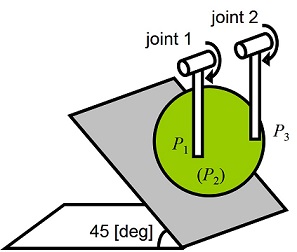
<Joint torque optimization for graspless manipulation>
三次元多指ケージングの理論と実行
ケージングとはロボットによって物体を囲い込み,抜け出せないように閉じ込める物体拘束手法です.
<3D Multifingered Caging>
一般的な物体拘束手法として知られる「把持(grasping)」は物体を掴み,接触力を加えて物体を保持します.そのため,さまざまな方法で接触力の大きさをセンシングし,適切な把持力となるように力制御する必要があります.
一方,ケージングの場合にはこの力制御が不要で,制御の簡単な,ロボットの位置制御だけで物体を把握できるという利点があります.
また,物体の形状特徴さえわかれば,物体の拘束計画が立てられるというのも利点の一つです.
ここでは三次元空間の実際のロボットハンドによるケージングを「三次元多指ケージング」と呼び,その物体拘束理論の導出や,実行のための物体認識,動作計画などに取り組んでいます.
ケージングの分類
我々はケージングの物体拘束方法を3通りに分類しています.「包み込みケージング(Envelope-type caging)」,「リング型ケージング(RIng-type caging)」,「くびれ型ケージング(Waist-type caging)」です. 包み込みケージングは,対象物の周囲を囲い込むことで,その内部の対象物を抜け出せないように拘束する手法です. これを実現するためには最低,3本の指が必要になります.リング型ケージングは物体の穴領域に指を挿入して,指先を閉じることで拘束する手法です.(物体の穴領域と,ハンドの輪っかで Hopf Link をつくります.) 2本指のハンドでも確実に物体を拘束できるため,ケージングの中でも比較的よく行われる手法です.
くびれ型ケージングは物体のくびれ,つまりほかより細くなっている部分の周囲を指で囲む手法です.これによって,ほかの太い部分が指の輪っかにひっかかり抜け出せなくなります.
リング型ケージングのための物体認識
リング型ケージングの達成のためには,対象物の穴形状の特徴が抽出できればよいことになります. これまでに,ハサミを対象物としてその形状特徴をカメラで認識する手法を提案しています.
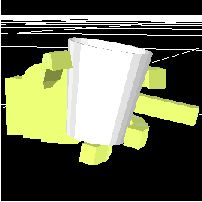
また,ポットのようなリング形状を有する物体について,距離画像を用いたリング形状の認識と,指の挿入位置・方向推定を行い,把握動作の計画と実行を達成しています.


電動義手によるケージングとパーシャルなケージングの提案
電動義手は上肢欠損者が手の代わりに使用する装着型のロボットハンドです. この義手で物体を操作するときに,細かな力制御をするのは難しいと考え,力に頼らない物体拘束であるケージングを適用しました.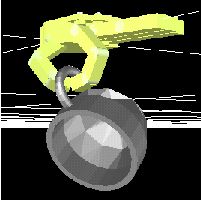


<Multifingered caging by a prosthetic hand>
人の手のように指の配置が対称的ではない場合には,物体を完全に囲い込むことは難しいです. そのような場合には部分的に囲い込むことで,ある程度の物体拘束を保証することを考えます. このような不完全な幾何学的拘束を「パーシャルなケージング(Partial caging)」と呼び,ケージングを緩和した手法として提案しています. パーシャルなケージングの場合でも,例えば重力の方向(下向き)を考慮することで,上方向には抜け出すことは可能でも“抜け出しにくい”といった状況を作ることができます.
手指の弾性特性の解明とスポーツ科学への応用
手指の筋腱複合体の弾性特性の解析
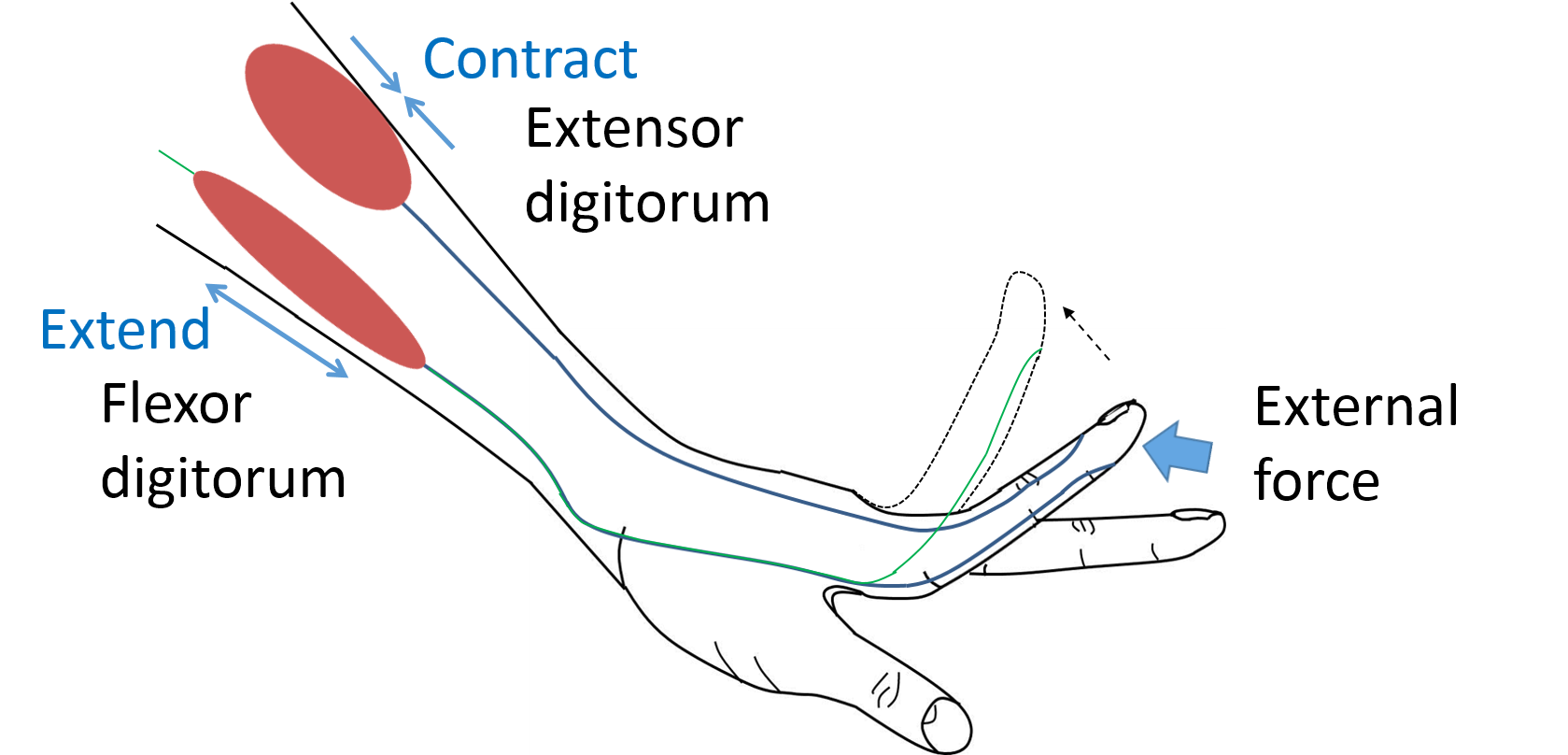
筋腱複合体(Muscle-Tendon Complex)とは筋と腱の総称です.
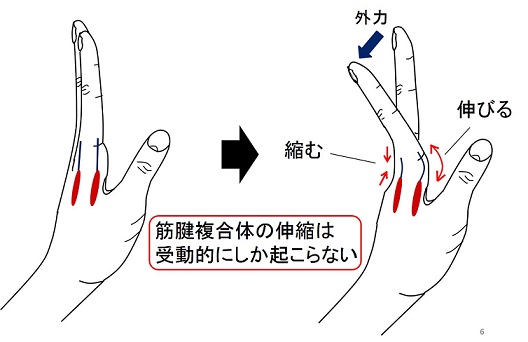
腱は筋と骨をつなぐ組織で,通常の筋力では伸びることは少なく,筋の収縮によって骨が運動するのを支える役割があります.
しかし,外力を加えることで腱が伸長し,ばねのようなふるまいをみせることがあります.
例えば,跳躍するときにグッとしゃがみこむと腱が伸長され,しゃがまない場合よりも高く跳躍することができます.
これは腱に蓄えられた弾性エネルギーが解放されることで運動エネルギーに変換され,身体が速度を得るためにより高く跳ぶことができます.
つまり,腱の持つ弾性特性をうまく使うことで,筋力だけでは発揮できないような運動速度でも発揮できるようになります.本研究では,これまであまり注目されていなかった手指の筋腱複合体に注目して,その弾性特性と,そこから得られる力学特性,運動特性を解析しています.
手指の筋腱複合体はバレーボールのオーバーハンドトスや野球の投球動作などに寄与していると考えられ,この特性を明らかにすることは人間のダイナミックな物体操作のメカニズムの解明につながると期待できます.
 <Muscle-tendon complex of the hand>
<Muscle-tendon complex of the hand>
バレーボールのオーバーハンドパスの動作解析
バレーボールのオーバーハンドパスはボールを受け止めて緩衝する動作とボールを押し出す動作の2動作が100ms以内に実施される高度な技術です.このとき,手指の弾性(外力で反らすと反力で高速に戻る)が大きく関与していると予想しています.本研究では動作中のボールと手指との運動を計測し,オーバーハンドパスの力学モデルを構築し,定量的な評価を目指します.
その他
ツシマヤマネコの野生個体の調査研究
環境省 九州地方環境事務所対馬自然保護官事務所(対馬野生生物保護センター)と共同で,絶滅危惧種に指定されるツシマヤマネコの野生環境下での生態を,自動制御や通信技術を用いて調査することを目的としています.保護されるなど捕獲された野生個体は体内にマイクロチップを埋め込んでから自然環境に戻され,その後,随時,追跡調査が行われます.しかしながら島内の8割以上が森林で覆われる対馬において,その探索は容易ではありません.
そこで,個体の捕獲時にマイクロチップのIDを調査するリーダーを自動起動させ,野生環境下で個体の行動を自動的に記録する装置を開発しました.本装置は順次アップグレードされ,体重の同時計測,装置の稼働時間の延長(約1週間の連続稼働)を達成しています.
今後は装置の台数を拡大し,広域に配備することを目指します.これにより,複数個体の行動の時系列データを収集できると期待しています.
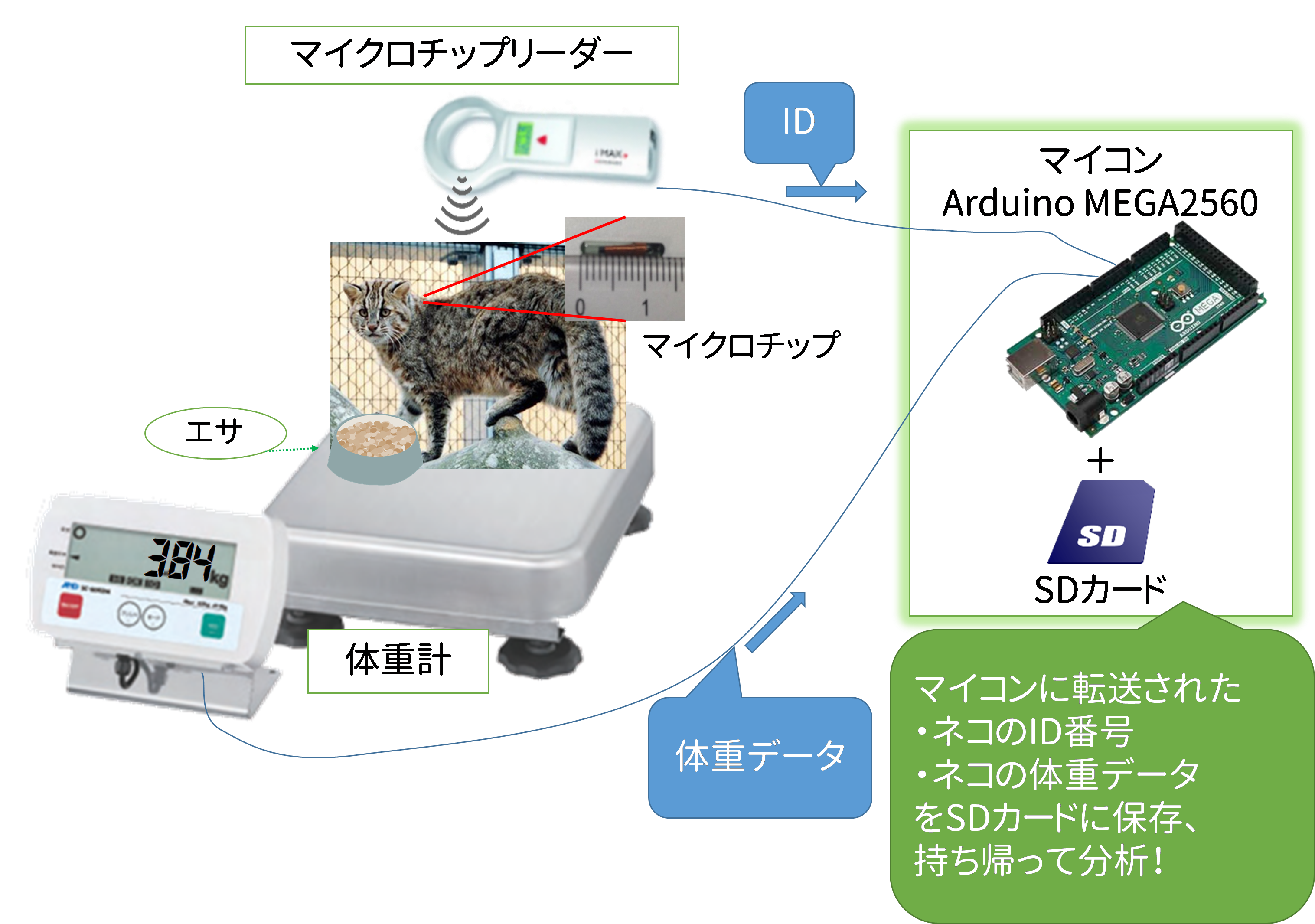
<ツシマヤマネコの野生個体の観測ボックス>
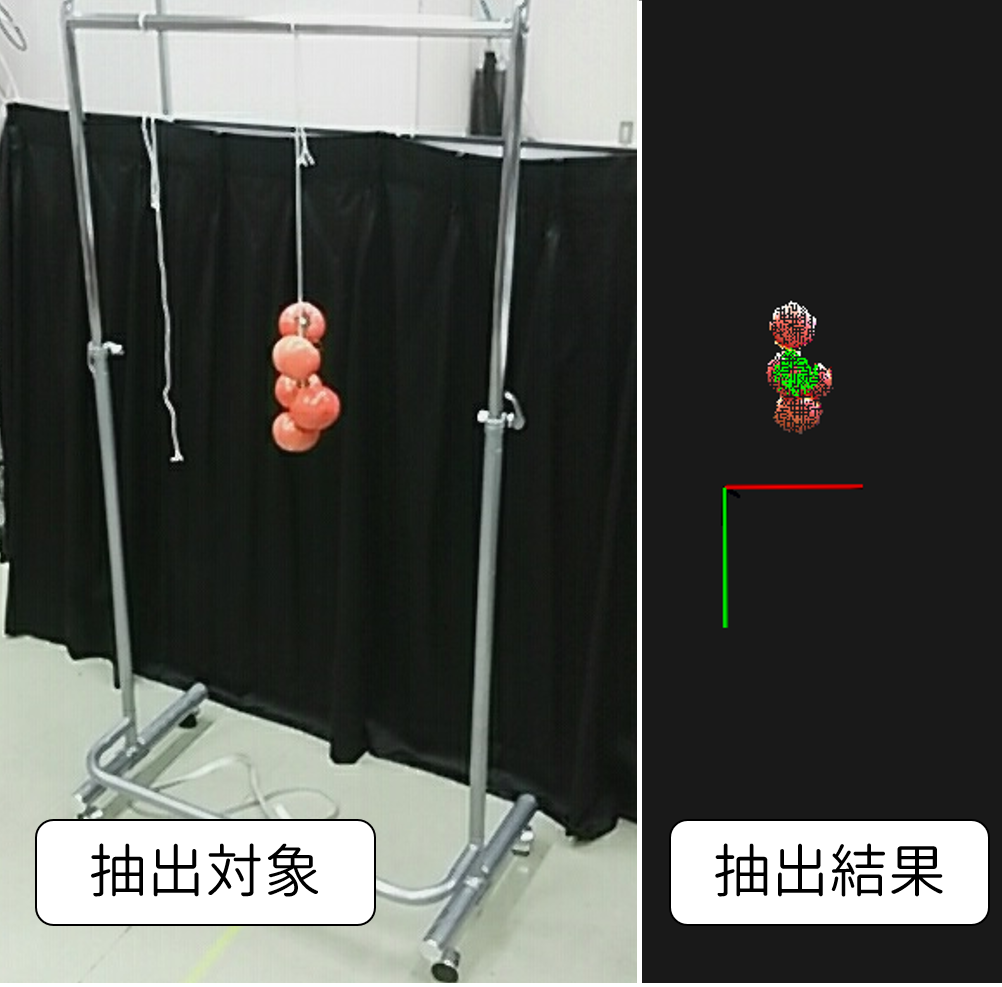
トマトロボット競技会
毎年12月に九州工業大学ロボット具現化センターが開催するトマトロボット競技会に,長崎総合科学大学の佐藤雅紀研究室と共同で参加しています.
精密部品組み立て装置の制御
槇田が大学院修士のときに,AJI 株式会社と共同で,精密部品組み立て装置の制御に関する研究に取り組みました.画像処理による位置決め制御と,線形ばねを用いた能動的な押し付け加重制御を組み合わせて,精密部品のハンドリング性能を向上させました.
