Robotic Manipulation and Hand Mechanics
当研究室では,「手を使った物体操作」をキーワードに,産業用ロボット,ロボットハンドによる物体操作(マニピュレーション)と,人間による物体操作における身体運動の解析,手指の筋腱複合体のメカニズム,およびその関連分野を研究しています. 福岡工業大学 工学部 知能機械工学科
福岡工業大学 工学部 知能機械工学科News
研究発表
SI2025にて研究発表を行います.
- 古後太陽,槇田諭:``6軸マニピュレータの手先位置・姿勢の差分と基礎ヤコビ行列に基づく軌道追従制御'',計測自動制御学会システムインテグレーション部門講演会,1E8-14,広島,2025年12月.
- 西山和樹,槇田諭:``湾曲型空気圧ゴム人工筋の板ばねの固定方法に関する検討 ---外付けする板ばねの固定方法による湾曲特性の変化---'',計測自動制御学会システムインテグレーション部門講演会,2B4-04,広島,2025年12月.
- 李文傑,槇田諭:``移乗介助装置におけるRGB-Dカメラを用いた腋下部推定'',計測自動制御学会システムインテグレーション部門講演会,3E4-08,広島,2025年12月.
- 堀川達矢,森柔磨,檀朝暉,李慧貞,佐藤雅紀,槇田諭:`` 小型軽量なトマト収穫機構のモジュール化'',計測自動制御学会システムインテグレーション部門講演会,3A6-07,広島,2025年12月.
研究発表
Journal of Robotics and Mechatronicsに論文が掲載されました.ロボットによる物体組立の手順において,力学的物体拘束と幾何学的物体拘束の両方を考慮して,単腕マニピュレータで作業を遂行する手法を提案しました.
S. Makita and Y. Honda: ``Mechanical and Geometric Constraints for Robotic Assembly with a Single Manipulator,'' Journal of Robotics and Mechatronics, Vol. 37, No. 3, pp. 731--741, Jun 2025.
- Abstract and Full-text (Open Access) on Fuji Technology Press Ltd. doi: 10.20965/jrm.2025.p0731
研究発表
日本機械学会ロボティクス・メカトロニクス講演会2025で研究発表をしました.
辻田敬梧,槇田諭:``ゲルシートの構造色変化の識別に基づく圧縮荷重推定''
西山和樹,高野倫之,原田元気,槇田諭:``湾曲型空気圧ゴム人工筋の内部構造による湾曲特性 ---内蔵する板ばねの材料と寸法による違い---''
堀川達矢,寺方瑛都,森柔磨,檀朝暉,佐藤雅紀,槇田諭:``小型軽量なトマト収穫ロボットの開発''
研究発表
JSME-RMD Int'l. Conf. on Advanced Mechatronicsで研究発表をしました.3次元空間の多指ハンドによるケージング把持について,把持実現可能な領域を離散的に求める手法を議論しました.
S. Makita, A. Hayashida and T. Otsubo: ``A Discrete Exploration of Object Configuration for Three-dimensional Caging Grasps,'' JSME-RMD Int'l. Conf. on Advanced Mechatronics, pp. 231--232, Kitakyushu, Nov 2024.
解説記事
日本ロボット学会誌に解説記事が掲載されました.高等専門学校教員だったときに2ヶ月の育児休業を取得した体験談を記しています.
槇田諭: ``男性高専教員が育児休業を取得したときの話'', 日本ロボット学会誌,42巻,4号,pp. 350--351,2024年6月.
研究発表
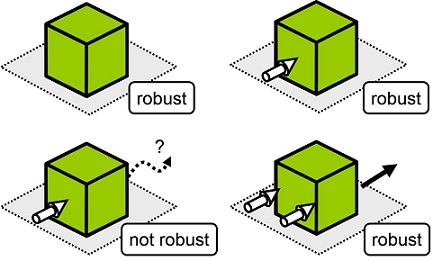
日本ロボット学会誌に学術論文が掲載されました.把持や搬送動作において,対象物の落下などの不測の事態に備える添え手などの非接触な幾何学的拘束の効果を,力学的指標に基づいて評価する手法を提案しました.
濵田涼,槇田諭: ``ロボットマニピュレーションにおける非接触な幾何学的拘束の効果をポテンシャルエネルギーに基づいて評価する手法'', 日本ロボット学会誌,日本ロボット学会誌,42巻,4号,pp. 410--413,2024年6月.
お知らせ
2020年4月より福岡工業大学へ異動しました.
研究テーマ
ロボットマニピュレーションの解析と計画
マニピュレーションの力学
ロボットによる物体操作(ロボットマニピュレーション)では対象物に対してロボットや環境から接触力がはたらくことで,物体を保持したり,あやつりを実行したりできます. そのため,この接触力を解析することは物体操作が狙い通りに実行できるかどうかを考える上で重要です. 本研究では物体に働く摩擦力の制約条件を検討し,接触力の解析とその応用に取り組んでいます.
ケージング
ケージングとはロボットによって物体を囲い込み,抜け出せないように閉じ込める物体拘束手法です. ケージングではロボットの位置制御だけで物体を把握できるという利点があります. また,物体の形状特徴さえわかれば,物体の拘束計画が立てられるというのも利点の一つです. ここでは三次元空間の実際のロボットハンドによるケージングを「三次元多指ケージング」と呼び,その物体拘束理論の導出や,実行のための物体認識,動作計画などに取り組んでいます.

手指の弾性特性の解明とスポーツ科学への応用
手指の弾性特性の生理学的解明
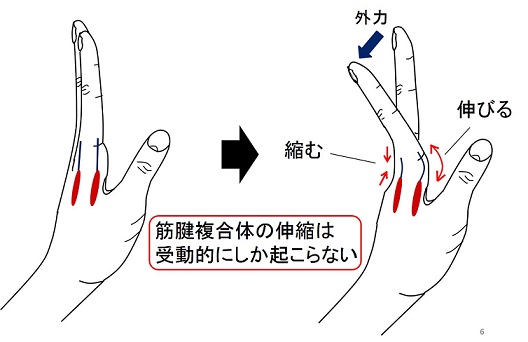
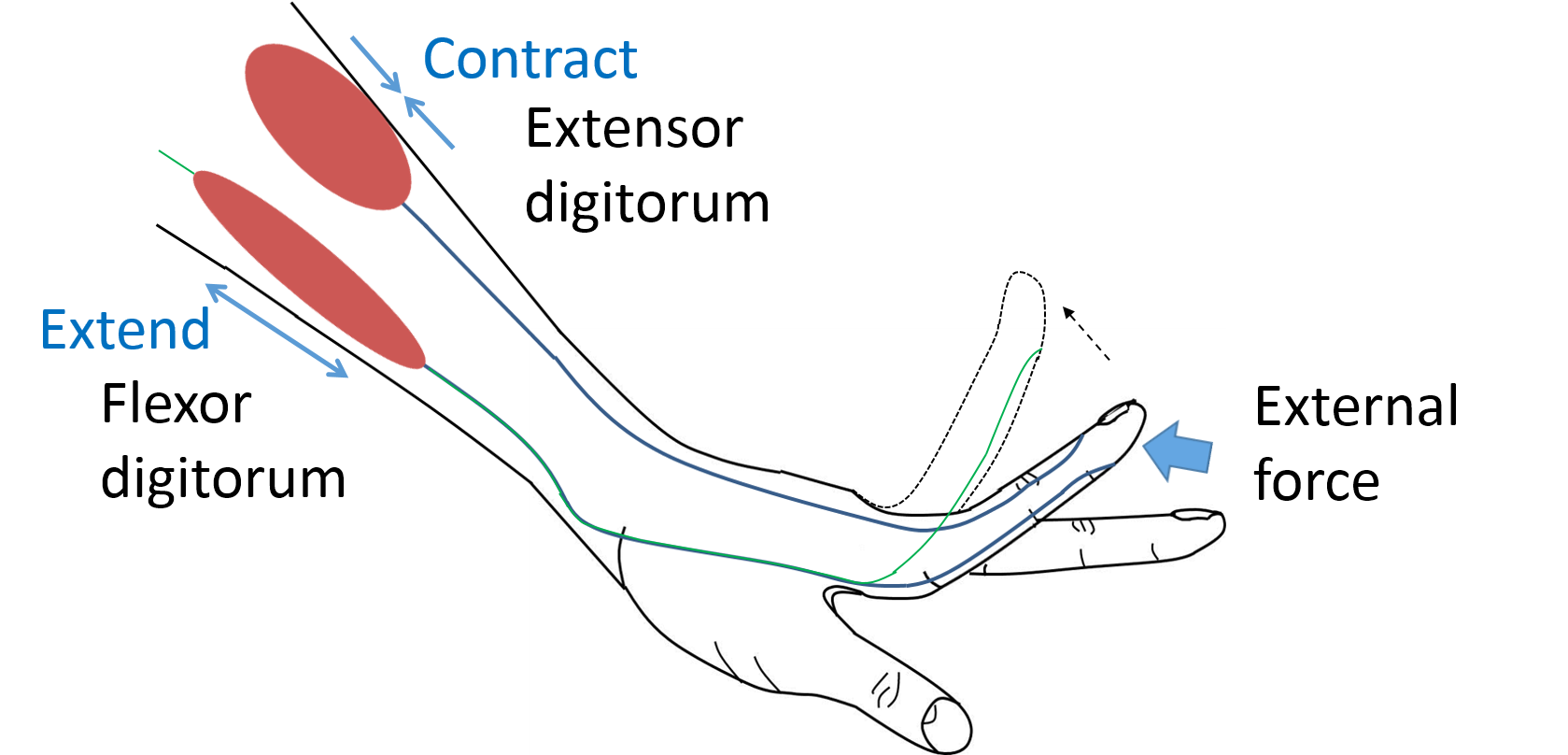
筋腱複合体(Muscle-Tendon Complex)とは筋と腱の総称です. 腱は筋と骨をつなぐ組織で,通常の筋力ではほとんど伸長しませんが,外力を加えることで腱が伸長し,ばねのようなふるまいをみせることがあります. 腱の持つ弾性特性をうまく使うことで,筋力だけでは発揮できないような運動速度でも発揮できるようになります.本研究では,手指の筋腱複合体に注目して,その弾性特性と,そこから得られる力学特性,運動特性を解析しています.
バレーボールのオーバーハンドパスの動作解析
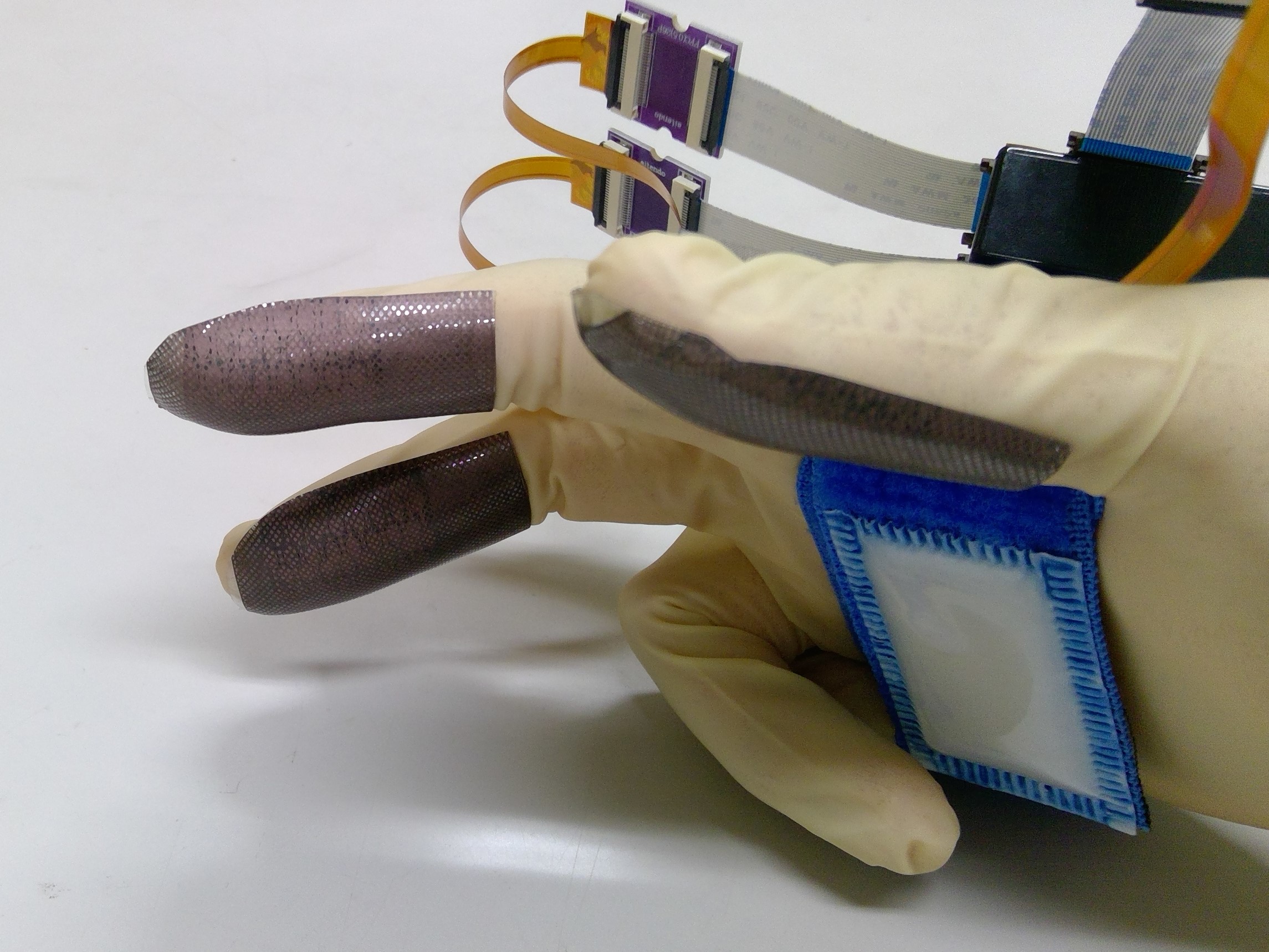
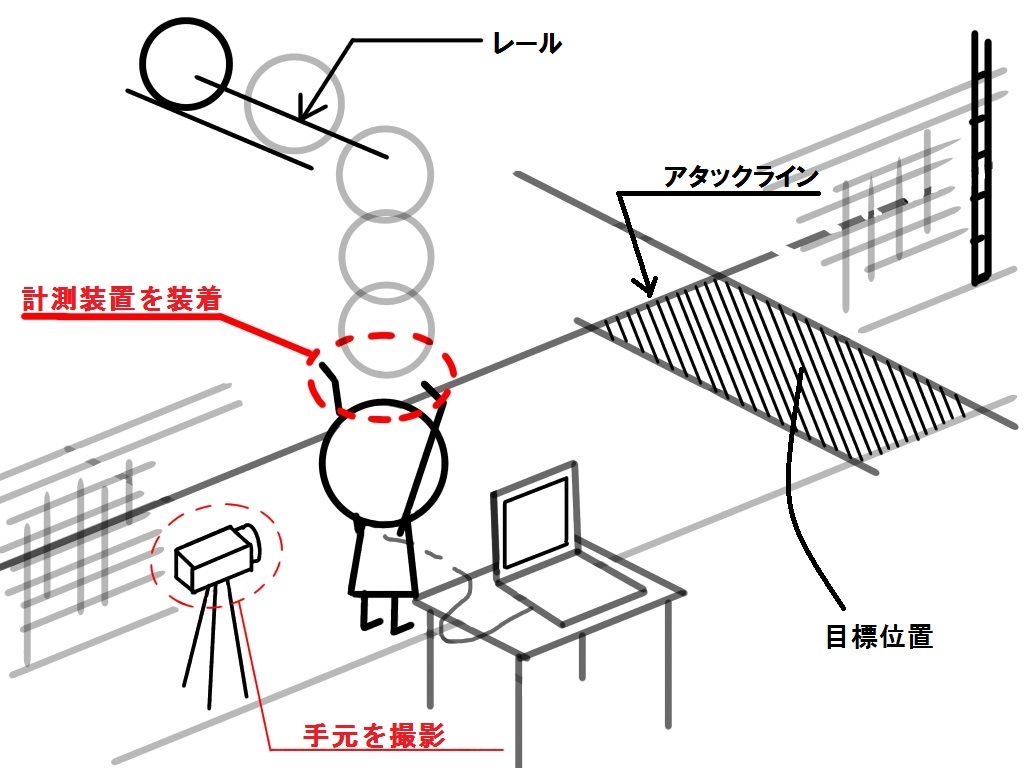
バレーボールのオーバーハンドパスはボールを受け止めて緩衝する動作とボールを押し出す動作の2動作が100ms以内に実施される高度な技術です.このとき,手指の弾性(外力で反らすと反力で高速に戻る)が大きく関与していると予想しています.本研究では動作中のボールと手指との運動を計測し,オーバーハンドパスの力学モデルを構築し,定量的な評価を目指します.
 発表文献
発表文献
査読付き学術論文
S. Makita and Y. Honda: ``Mechanical and Geometric Constraints for Robotic Assembly with a Single Manipulator,'' Journal of Robotics and Mechatronics, Vol. 37, No. 3, pp. 731--741, Jun 2025.
査読付き国際会議論文
S. Makita, A. Hayashida and T. Otsubo: ``A Discrete Exploration of Object Configuration for Three-dimensional Caging Grasps,'' JSME-RMD Int'l. Conf. on Advanced Mechatronics, pp. 231--232, Kitakyushu, Nov 2024.
口頭発表ほか
辻田敬梧,槇田諭:``ゲルシートの構造色変化の識別に基づく圧縮荷重推定'',日本機械学会ロボティクス・メカトロニクス講演会,2A2-M09,山形,2025年6月.