木 室 義 彦 ( KIMURO, Yoshihiko)
福岡工業大学 情報工学部 情報システム工学科 ( Fukuoka Institute of Technology)









 プログラミング習得(プログラム入力から逐次処理まで)の平均所要時間は,
3.0 分でした.
未就学児が 5.3 分,小6が 2.4 分.ダンスが楽しかったみたいです.
プログラミング習得(プログラム入力から逐次処理まで)の平均所要時間は,
3.0 分でした.
未就学児が 5.3 分,小6が 2.4 分.ダンスが楽しかったみたいです.
|
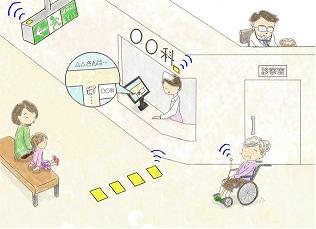
私たち ( 木室研究室、家永研究室 (前、九州先端研 ISIT)) は、ロボットタウン研究を
拡張するものとして、地元ベンチャー企業のロジカルプロダクト ( LP)、
九大医学部 ( DMI)と共同で、九大病院の協力を得て、病院内で人間を支援する
ロボット研究を行っています。 私たち独自の研究技術として、車いすロボットおよびこれを制御する環境側の ソフトウェアも含めたロボットシステムの技術を有しており、これを利用して、 LP社の開発提供する生体計測モジュールとの連携や、九大医および九大病院と 協力した、車いすロボットに搭乗する患者への影響調査などを進めています。 現在は、LPが研究開発を進める無線式運動・生体情報計測装置 ( BMWデバイス)を 利用した、より詳細な車いすロボットの搭乗者への影響を調査し、サービスロボットの 安全、安心の指針を得ようとしています。
なお、本研究開発プロジェクトは、福岡県、福岡市、北九州市による
「ロボット産業振興会議」の支援を受けております。
また、車いすロボットシステムの研究開発は、現在、九州先端研 (ISIT)と
福岡工大との共同で進めております。
製品化を想定した車いすロボットのハードウェア開発は、中小企業庁の支援を
受けて、桐木工作所との共同開発を進めています。
|

|
私たちは、次世代ロボットを人間と共生させるために、
環境側にセンサやデータ、プログラムや情報、知識を埋め込む
「環境情報構造化」の研究を進めてきました。
ロボットタウンや R-コンテンツプロジェクトです。
この中で埋め込まれた情報の多くは、その情報を取得可能な
地図上の位置との組で記録することができます。
地理空間における対象事物に対し、その位置や範囲と 属性情報が対になっている情報は「地理空間情報」と呼ばれます。 ロボットが環境情報を取り出す、すなわち、「ロボット用に 整備された地理空間情報を取得する」ためには、 地理空間情報の生成と管理の機能が必要になります。 私たちは、以上のようなシステムをロボット用の GIS (地理空間情報システム) 、すなわち、R-GIS と名付けて研究開発を行なっています。 (この研究は、NEDOおよび経済産業省の支援を受けて進めています。)
研究参画機関:九州先端科学技術研究所 (ISIT)、
環境GIS研究所 (ENGIS) : R-GISコンソーシアム |
.jpg)
|
次世代ロボットが人間と共生するために、環境側にセンサやデータだけでなく、
プログラムや情報、知識を埋め込む環境情報構造化プラットフォーム
( ロボットタウン) の研究開発を複数の機関と共同で行なっています。
特に、当研究所は、ICタグやGISなどの新しい情報インフラ技術を利用した
ロボット支援システムを中心に研究を行なっています。(この研究は、
JSTの支援を受けて進めています。)
研究参画機関:九州大学、九州システム情報技術研究所 (ISIT)、
安川電機、九州日本電気ソフトウェア (QNES)
|

|
新たなロボットサービス実現の枠組みとして、R-コンテンツシステムを
提案しています。これは、
研究参画機関:九州システム情報技術研究所 (ISIT)、
ネットワーク応用技術研究所、桐木工作所、九州大学
|
|
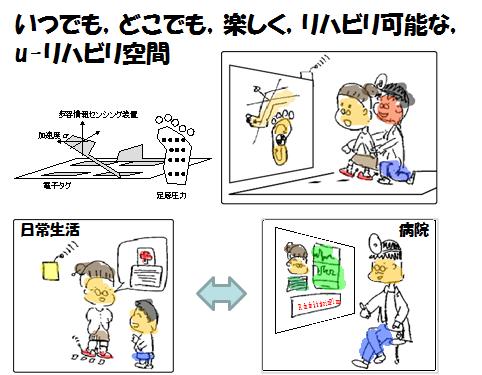
私たちは、いつでも、どこでもリハビリが可能な「u-リハビリ空間
(ユビキタスリハビリ)」を実現するシステムの開発を目指しています。
また、これ以外にも、視覚障がい者や聴覚障がい者、高齢者にとって
有用な技術の開発を行なっています。本研究テーマは、福岡工業大学
情報工学部 情報工学科 家永研究室と協力して進めています。
研究参画機関:
九州工業大学、産業医科大学、ロジカルプロダクト、九州先端科学技術研究所 (ISIT)
|

|
情報技術が政治/経済/社会システムに広く組み込まれてきた現在、一般の
人々に情報技術の本質を理解してもらい、その取り扱いに関して社会的なコン
センサスを形成しておくことが、社会的に重要なテーマになってきました。
このコンセンサス形成の手段として、初等中等教育が重要であると考えています。
本研究室では、他大学や外部の教育機関、企業と協力し、ロボットを用いた
計算機動作原理教育(情報技術教育)、IRT教育のカリキュラムおよび教材を
開発し、社会への普及に向けた活動を行ないます。
|
多眼カメラシステム
球面画像の正射影像 右の画像をクリックすると、くるくる回る球面画像が見られます。(689 KB) (If you click the right image, you can see the rotation image.)
【継続、定常研究】