FIT工学部 研究室最前線 知能機械工学科 松谷研究室

筋骨格システムを対象としたセンサレス位置・剛制御法の実証的検証
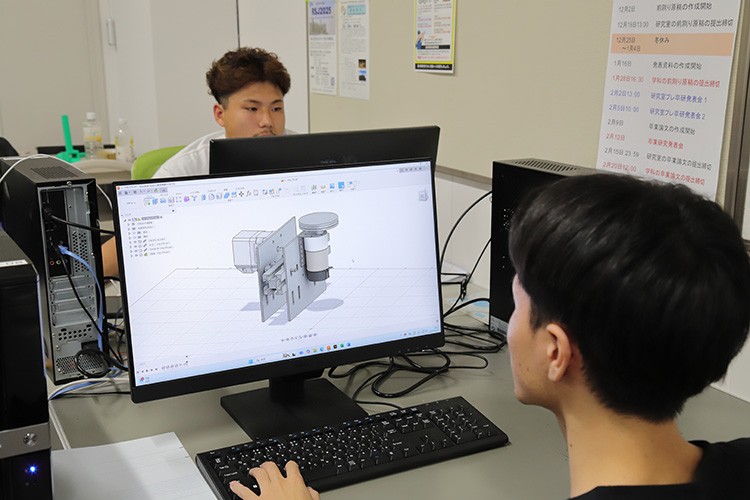
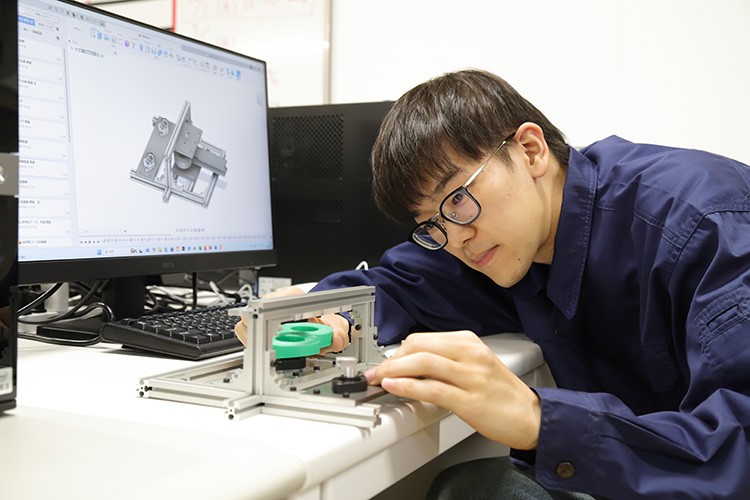
人間の上腕を模した2リンクアームの実験装置を製作中。
松谷研究室では、人間が持つ筋骨格構造をロボットに模倣させることで、ロボットの柔軟な動作を実現する研究に取り組んでいます。私は現在、「筋骨格システムを対象としたセンサレス位置・剛制御法の実証的検証」というテーマのもと、人間の上腕を模した2リンクアームの実験装置を製作しており、スムーズな動作によって、アームを初期位置から目標位置へ正確に制御することを目標に研究を進めています。
私は2年次に大学のプログラムで1週間、アメリカのハワイの大学に留学していました。この経験が、私の中での大きな分岐点だったと感じています。留学では、現地の教授から生物の生態特徴を工学に応用した研究についてレクチャーしていただきました。内容が非常に面白かったため生物模倣の工学的応用への関心が高まり、同時にそうした研究を行ってみたいと強く思うようになりました。
INTERVIEW

研究室の魅力を語る
知能機械工学科4年
Y.N.さん
出身:
島根県立益田高等学校
※2025年10月取材時
工学分野の充実した学びと高い就職率に魅力を感じて入学。
私が福工大へ進学を決めたのは、高校時代、電車や自動車などモビリティ分野に興味をもっていたことがきっかけです。また、出身地の島根県を離れ、両親の出身地である九州、特に福岡の大学で工学を学びたいと考えていました。
数ある大学の中でも、福工大工学部は工学分野の充実した学びに取り組めるうえ、手厚いサポート体制によって就職率が他大学と比べて非常に高かったことから進学先に選びました。所属学科についても、高校時代に関心の高かった電車や自動車の製作に携わるような技術者になりたいと思っていたので、知能機械工学科の選択につながりました。今は、人間の身体構造を模倣するロボット分野へと興味の対象が移りましたが、知能機械工学科ならではという取り組みがいのある研究ができていることを実感しています。

自分のやりたかった研究に取り組めると確信し松谷研究室へ。
松谷研究室を選んだのは、留学後に興味を持ったことに関連する「人間の身体構造をロボットに模倣させる」という研究テーマだったことが理由です。研究室の説明を聞いて、私のやりたかった研究に取り組めると確信し、松谷研究室を選びました。最終的には、人間に似た形状と機能を持ったヒューマノイドロボットにつながっていく夢のある研究だと思っています。
松谷先生はとても優しく、丁寧に指導してくださっている印象です。研究活動においても、私の意見や考えを尊重してくださいますし、研究で困ったことがあれば的確なアドバイスをしてくださいます。また研究室の雰囲気は、とても賑やかで明るいです。毎日、研究室のメンバーたちと会話しながら楽しく研究活動を行っています。また研究室には大学院生も在籍していて、研究を進めるうえで分からないことがあると豊富な研究知識をもとに相談にのってくださるのでとても助かっています。
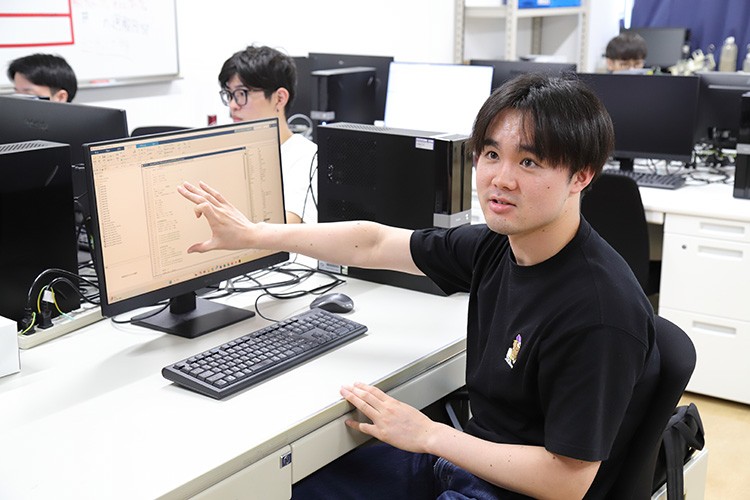
「筋骨格型受動歩行ロボットの歩容生成の研究」にあたり、MATLABというソフトで組んだシミュレーションプログラムを用いて解析を行う。
社会の需要に応える研究に取り組んでいるやりがいや充実感がある。
近年、医療現場や介護現場でロボットが活躍する場面が増えてきています。人を相手にするそのようなロボットは、繊細かつ柔軟な動きが求められます。松谷研究室では、人間の身体構造を応用した柔軟な動きを可能にするロボット製作を行っているので、研究の発展が社会の需要に応えることになると思います。ですから、将来私たちが製作したロボットが社会の様々な場面で活躍して人々の役に立つことを考えると、大きなやりがいを感じます。また今、「自分のやりたい研究」に取り組んでいることに満足感を覚えています。専門性もあり、未知のものを追究していくことは本当に楽しいです。また研究室の素晴らしいメンバーとも出会えて、良い雰囲気で研究活動ができているので、この研究室に入って良かったと思っています。
研究を通して身についたことは、「自分で道筋をたてて実行に移す能力」です。研究活動では、何を最終的な目標にして、そのために何をしなければならないのか、自分で考えなければ先に進みません。順調にいかないことの方が多いですが、試行錯誤して結果を出していく過程が大切だと思います。この研究室で、主体的かつ継続的に取り組む姿勢を身につけることができたと感じています。
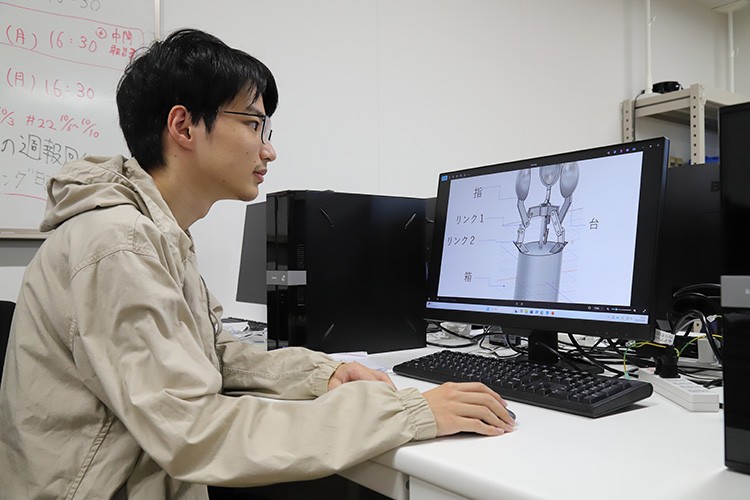
指の損傷治療後に、自身で行うリハビリテーション器具の開発に取り組む。設計した器具は、3Dプリンタで製作する予定。

リハビリテーション器具を使用した際の指の動きは、共同研究の学生がMATLABを用いてシミュレーション解析を行う。
大学院で人間の上腕を模した2リンクアームの研究を深めたい。
今後の目標は、研究テーマである人間の上腕を模した2リンクアームを、初期位置から目標位置にアームを収束させて、実際に使用できるようになるか「制御手法の有用性」を確かめることです。なお学部を卒業後は、大学院に進学して研究を深める予定なので、2年間を通してさらに専門性のある研究に精力的に取り組みたいと思っています。大学院修了後は、医療機器を扱う企業に就職する考えです。
福工大は学生と先生の距離が近く、先生が学生一人ひとりに寄り添ってくださる丁寧な指導が魅力です。本当に自分が学びたいものに対して、本気で取り組めるような環境が整っていると思います。特に、これからあらゆる分野で期待されるロボット分野に興味のある方は、工学部知能機械工学科への入学を検討してはいかがでしょうか。